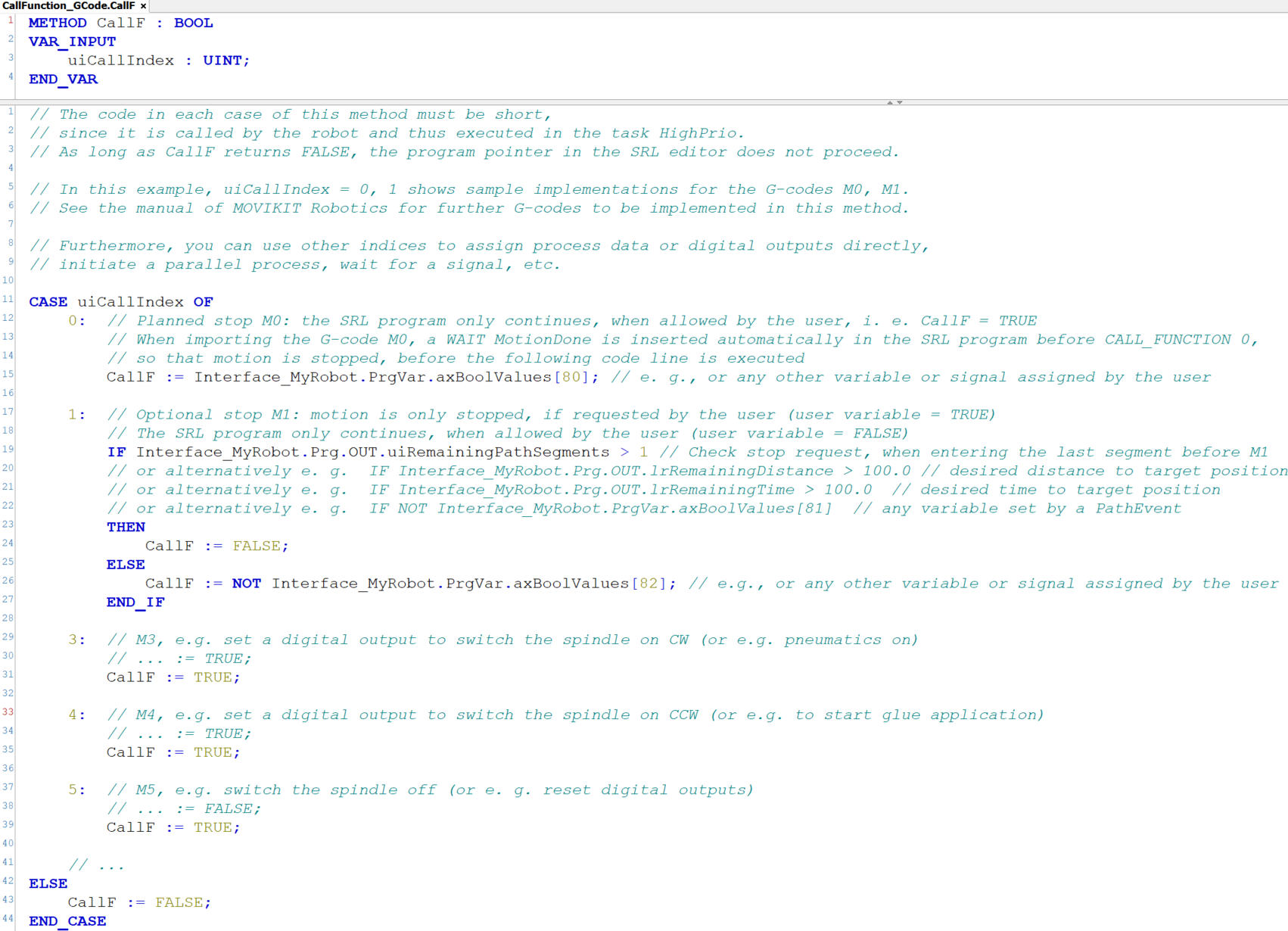
Call functions for G-code
MOVIKIT® Robotics
Language
Deutsch
English
SEW-EURODRIVE
Home
Application examples
Call functions for G-code