Application examples
Additional information
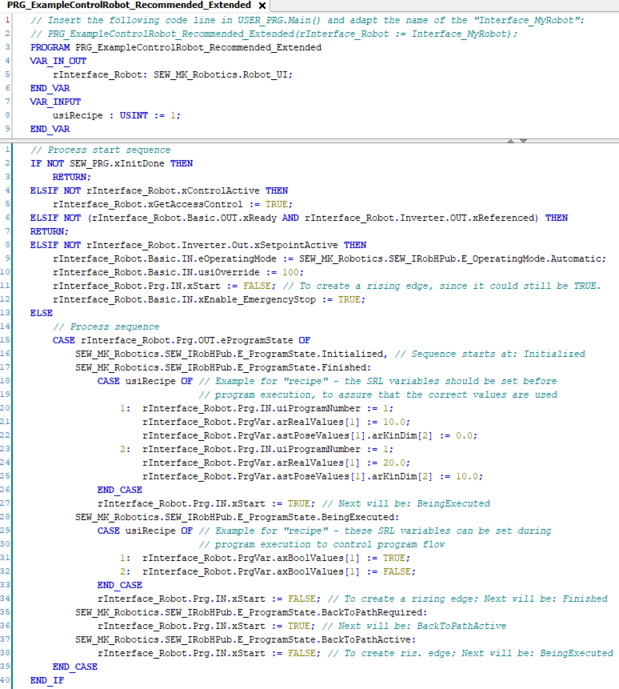
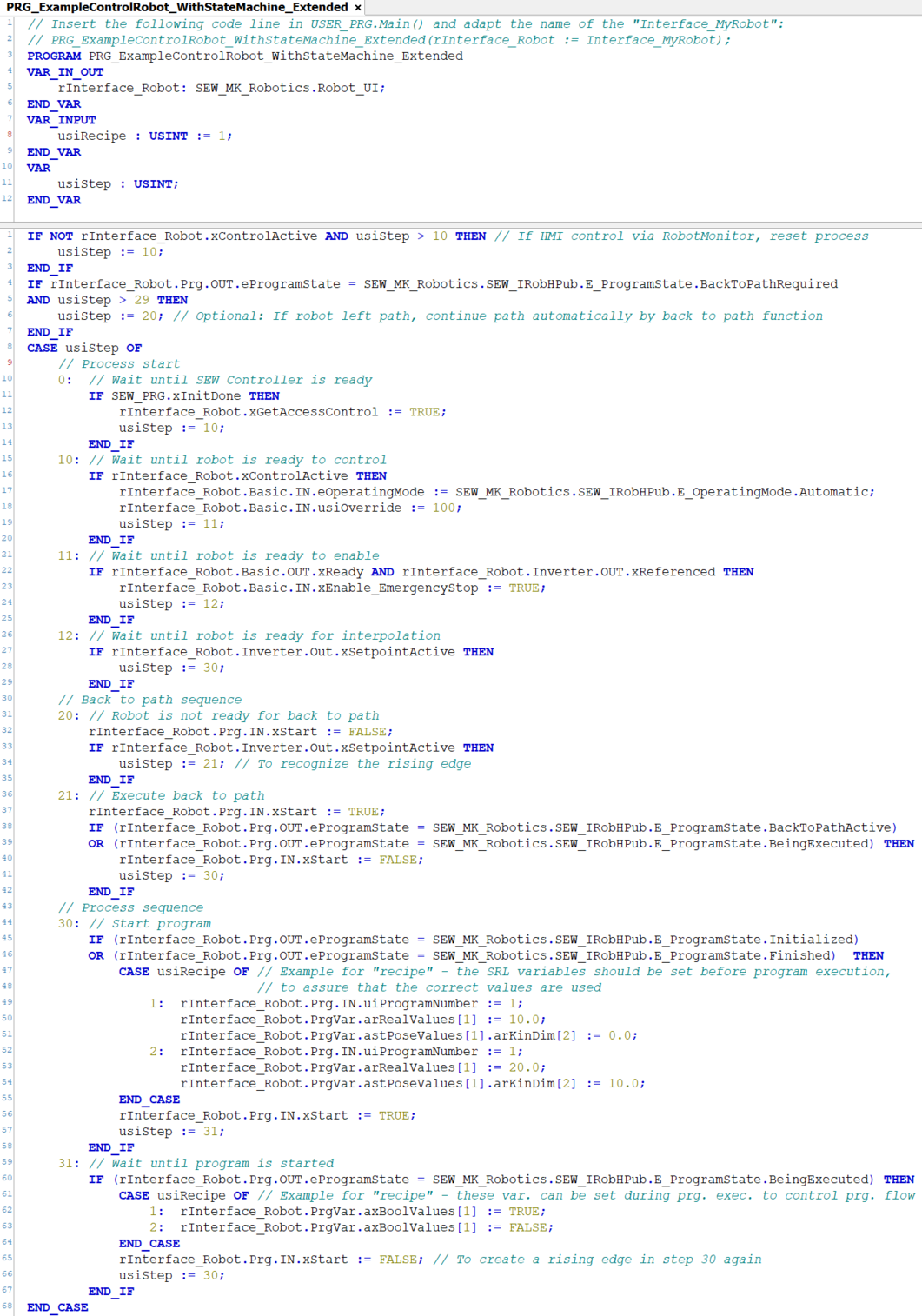
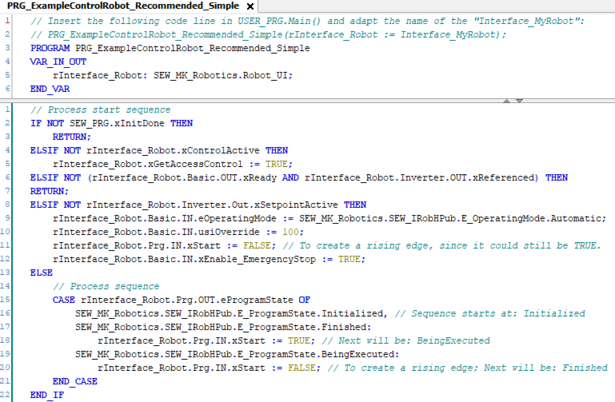
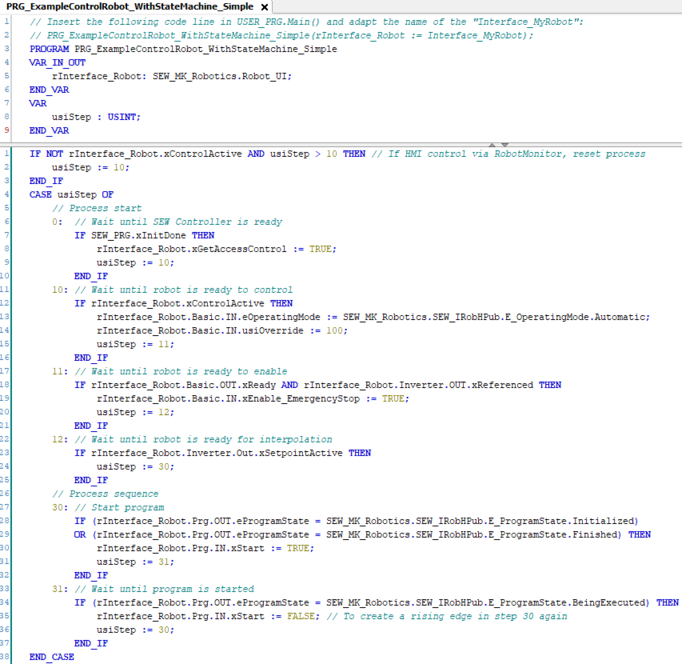
- Control via IEC program
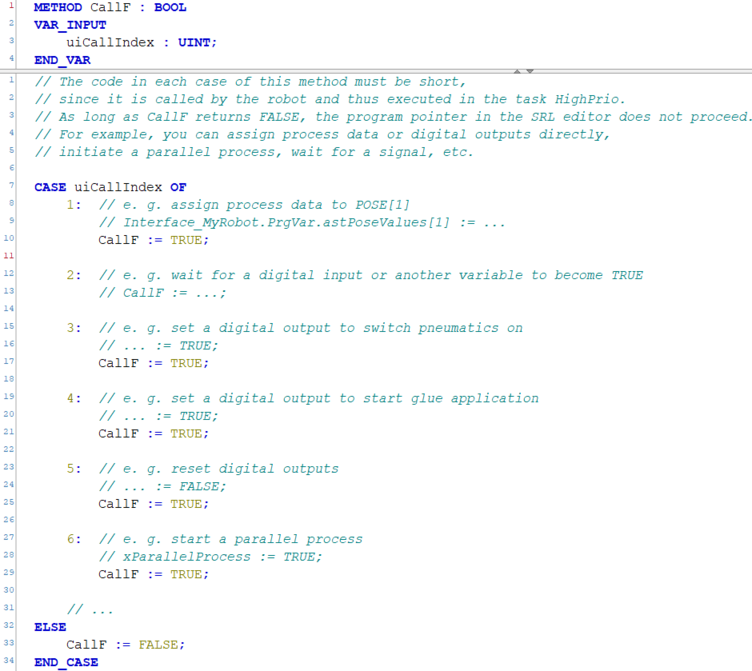
- IEC call function for the SRL program
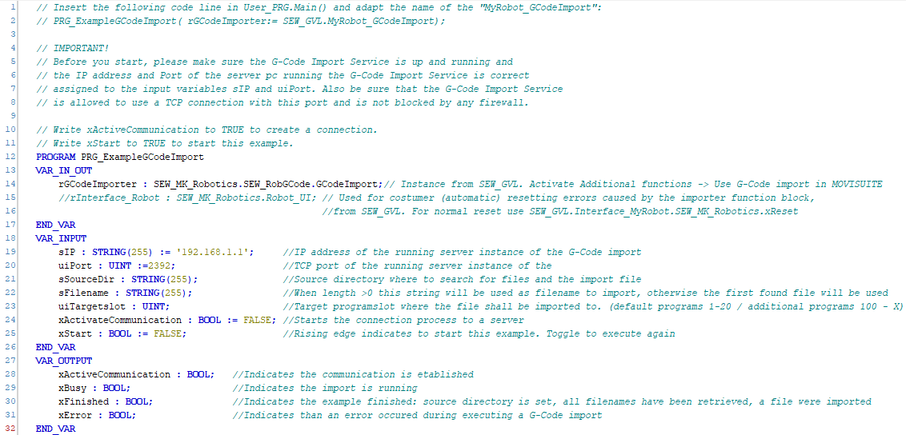
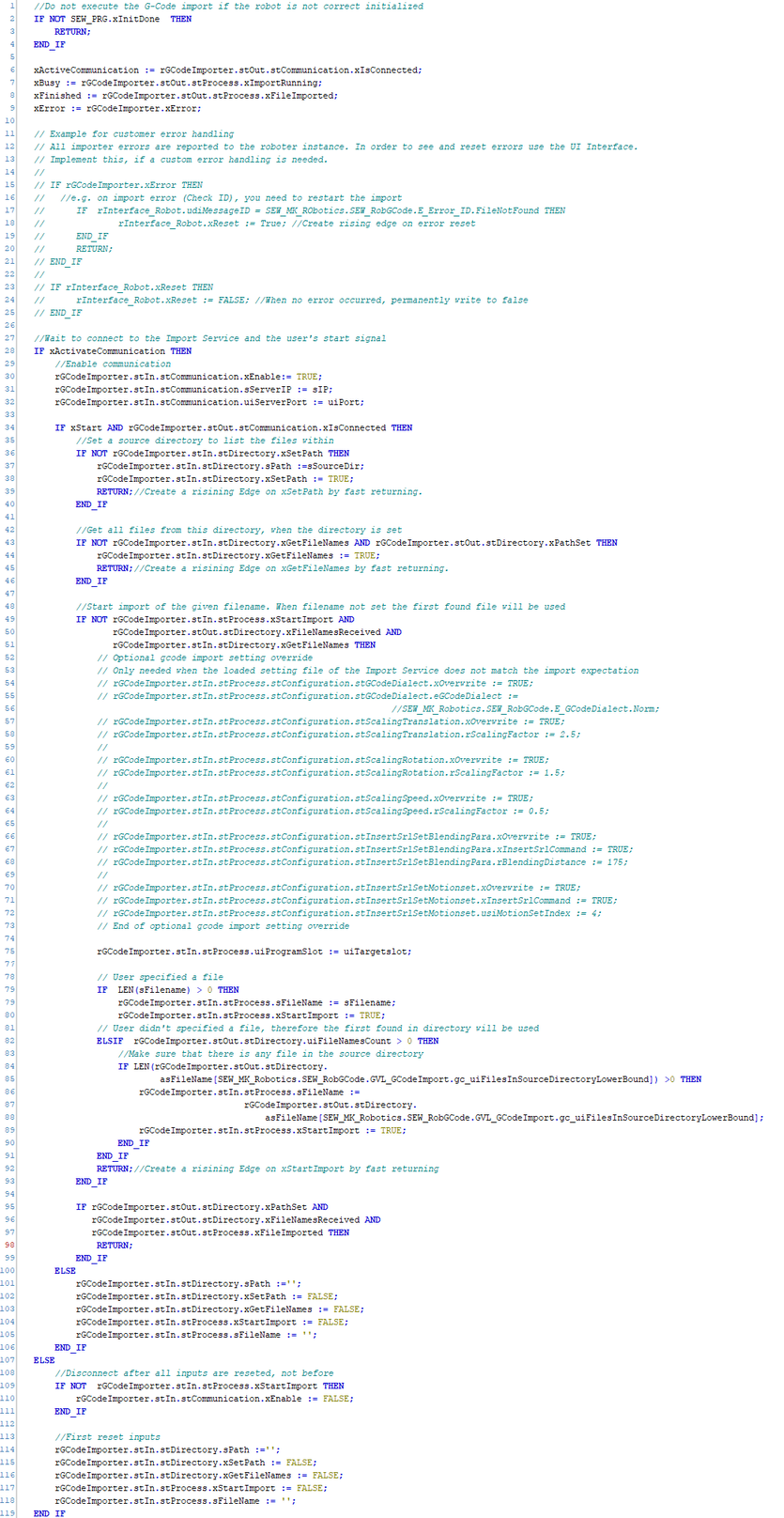
- Automatic G-code import
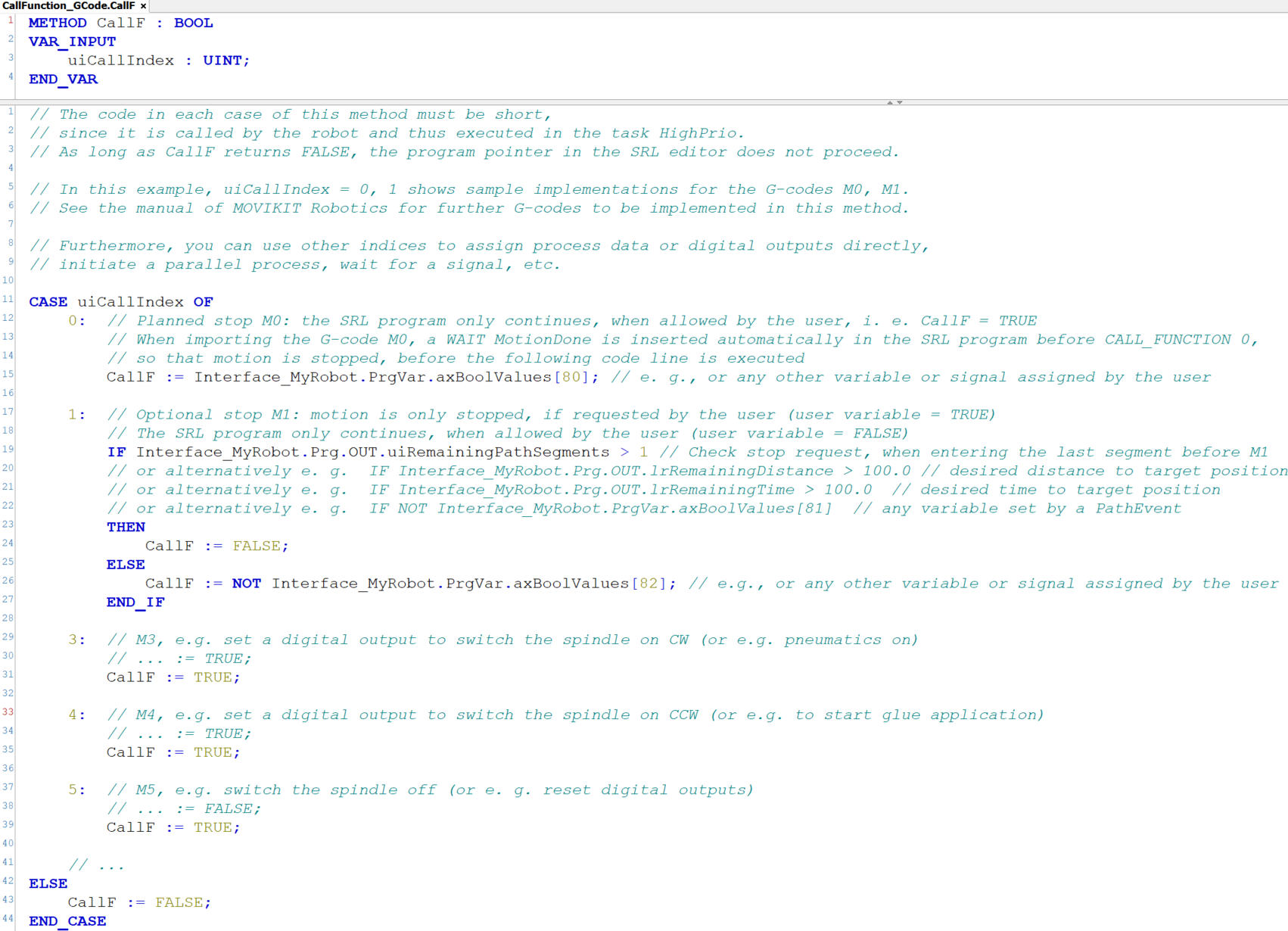
- Call functions for G-code
- Static USER coordinate systems
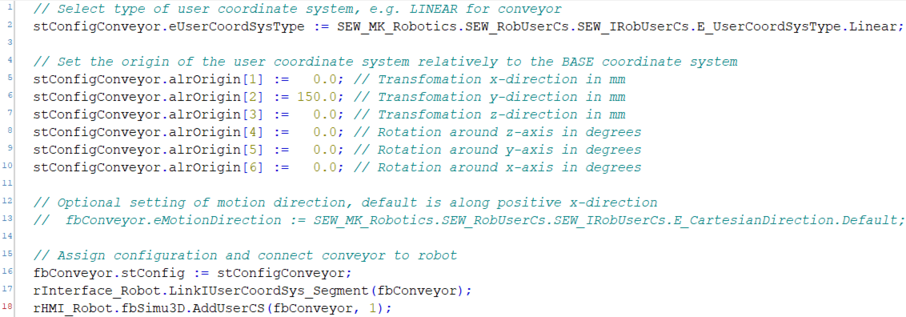
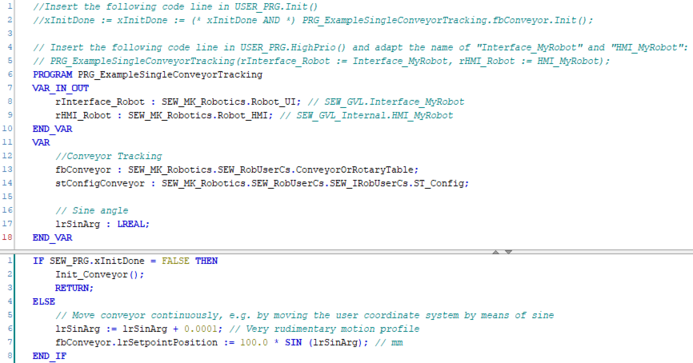
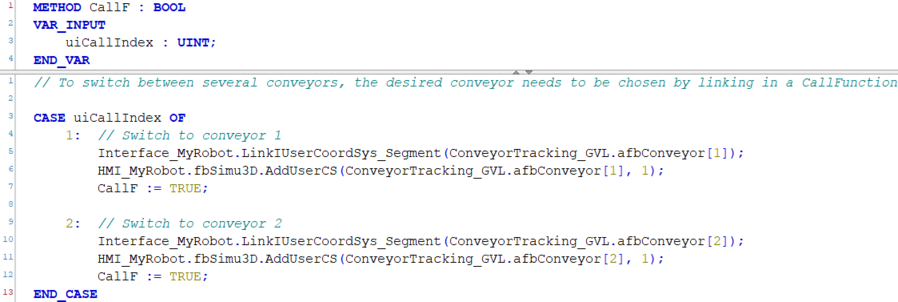
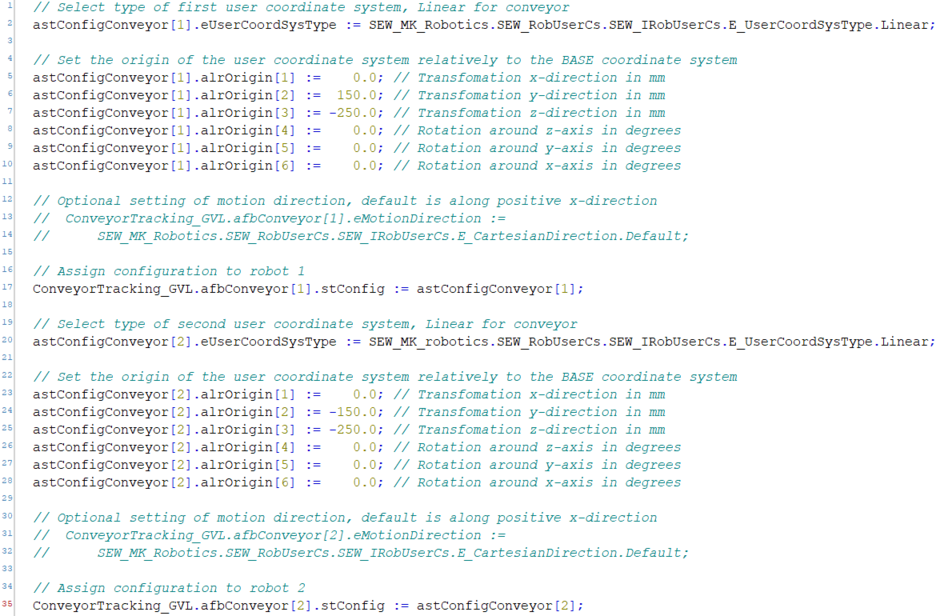
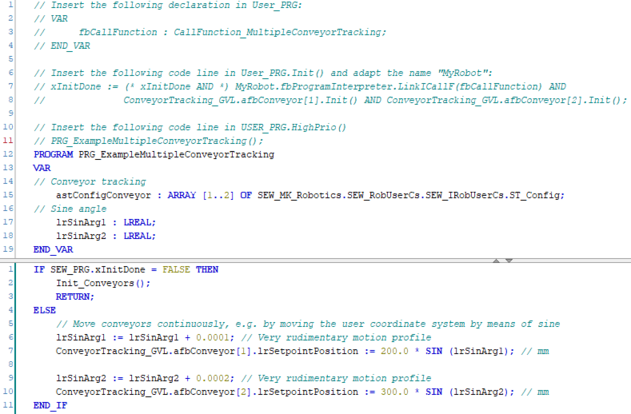
- Synchronized movement with a conveyor belt (conveyor tracking)
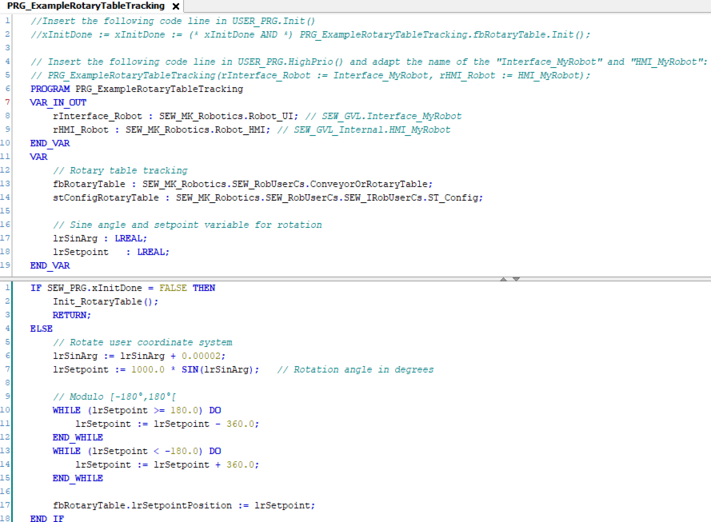
- Synchronized movement with a rotary table
- Special features of controlling a rotary table by the robot
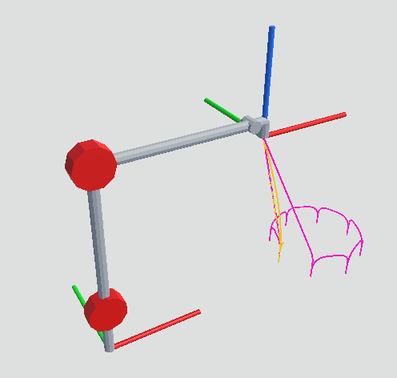
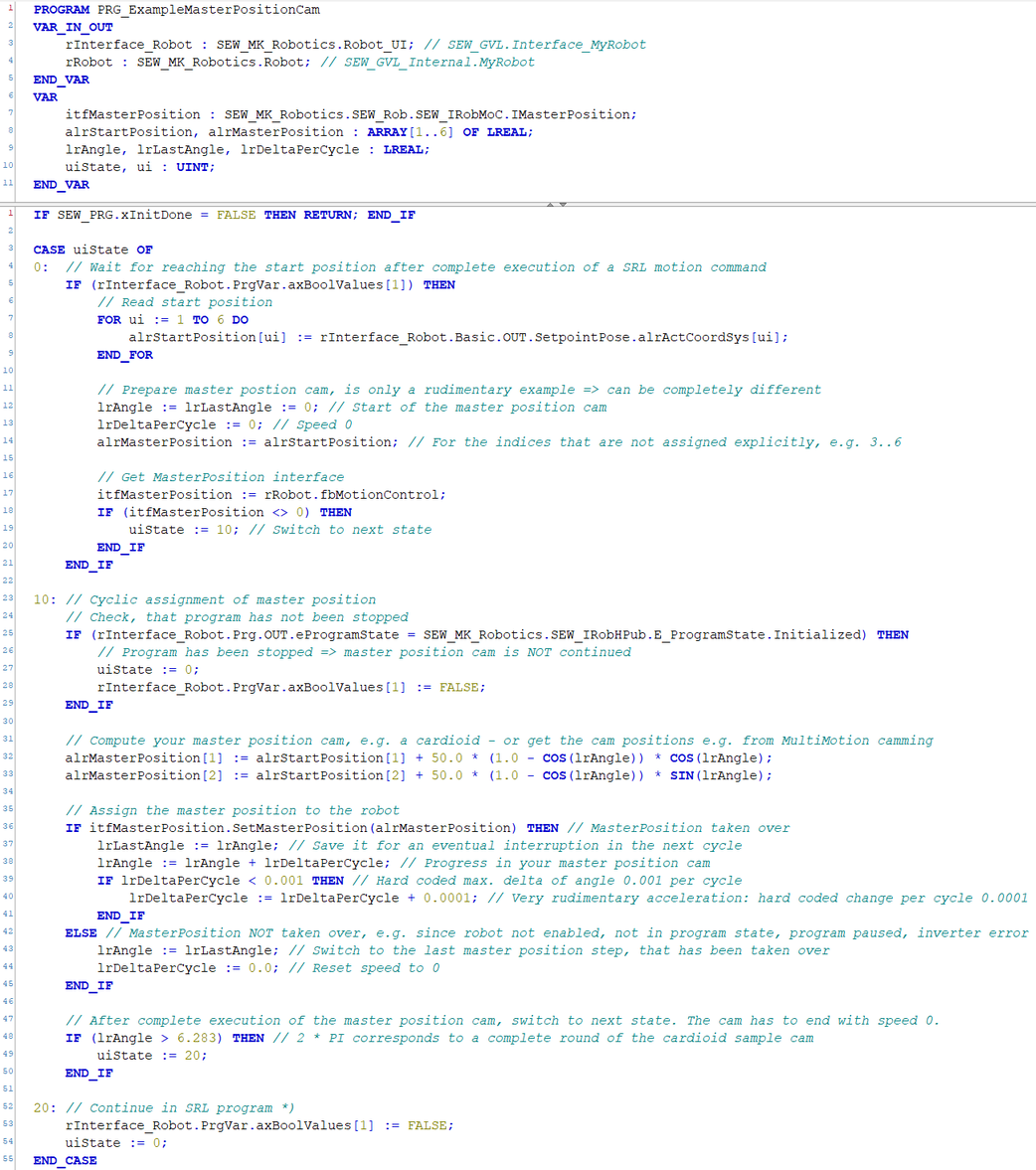
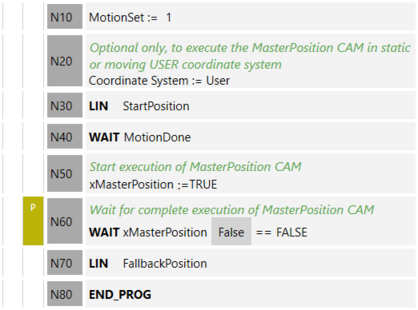
- Combination of electronic cam and robot functionality
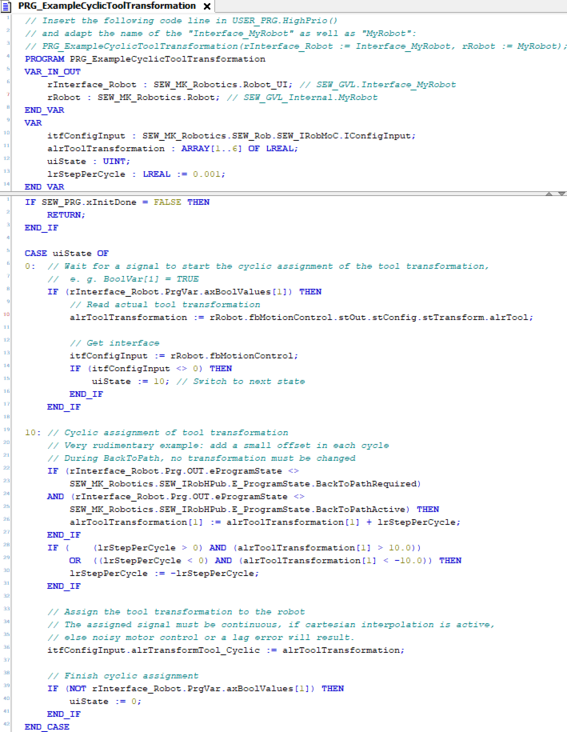
- Steady adjustments to the tool transformation
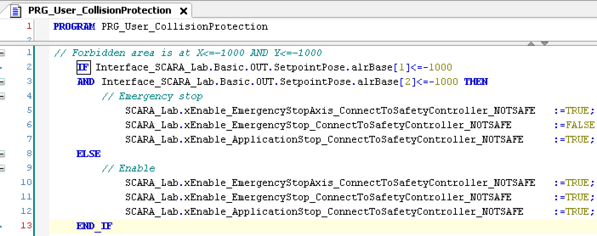
- Non-safety rated enable control
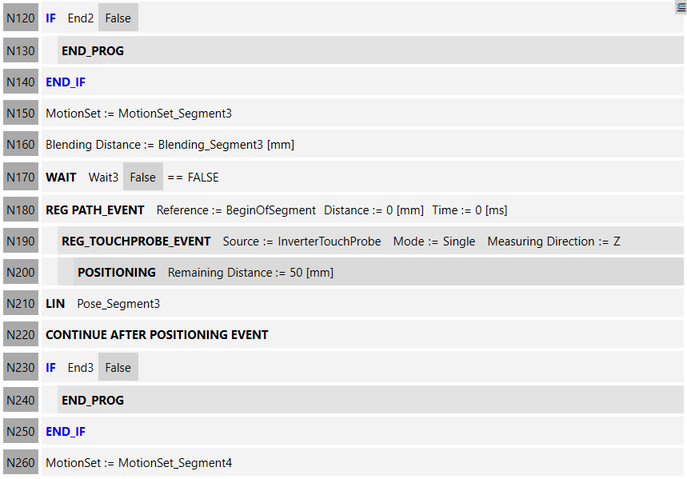
- IEC standard program with touchprobe
- External selector switch for operating modes
- Switching to single axis control
- Free function keys of the operator panel
- Combining the RobotMonitor with visualization
- Calculating the motion parameters
- Optimizing the cycle time
- Startup of collision detection