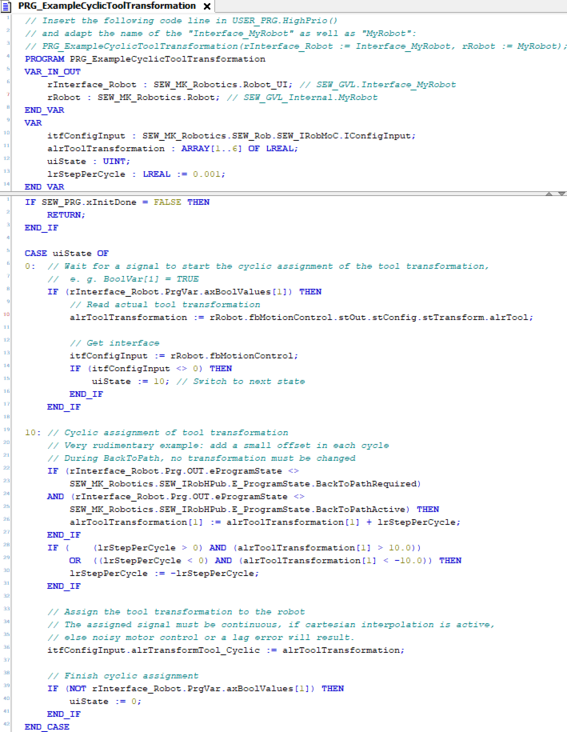
Steady adjustments to the tool transformation
For instance, you can steadily adjust the tool transformation to make fine adjustments of the path based on sensor information. To that end, the tool transformation must be cyclically assigned in the HighPriority task of the alrTransformTool_Cyclic property (see code example). The tool transformation must be steadily adjusted since surges due to the kinematics transformation have a direct effect on the setpoints of the axes.
INFORMATION
The following example can be imported in the IEC Editor. In the IEC Editor, open the menu [Tools] > [Scripting] > [Scripts] > [R], and select the menu entry [Robotics_Examples.py].
After the code example has been imported, the program must be opened in USER_PRG.HighPrio() as follows and the name of the robot node (e.g. MyRobot) assigned by the user in MOVISUITE® must be transferred to the example program:
PRG_ExampleCyclicToolTransformation(rInterface_Robot :=
Interface_MyRobot, rRobot := MyRobot);