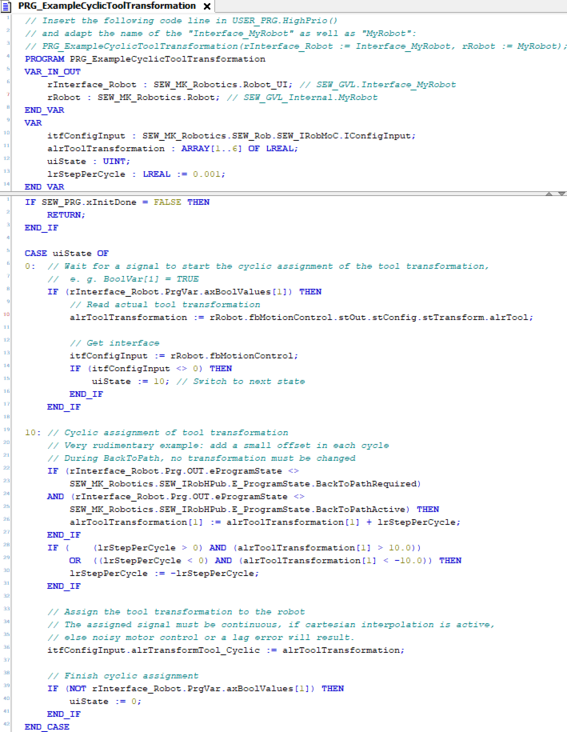
Stetige Anpassung der Werkzeugtransformation
Beispielsweise zur Feinanpassung der Bahn basierend auf Sensorinformationen besteht die Möglichkeit, eine stetige Anpassung der Werkzeugtransformation vorzunehmen. Hierzu muss die Werkzeugtransformation zyklisch in der Task HighPriority der Property alrTransformTool_Cyclic zugewiesen werden (siehe Code-Beispiel). Die Änderung der Werkzeugtransformation muss stetig sein, da sich Sprünge durch die Kinematiktransformation direkt auf die Sollwerte der Achsen auswirken.
HINWEIS
Folgendes Beispiel kann im IEC-Editor importiert werden. Öffnen Sie dazu im IEC-Editor das Menü [Tools] > [Skripting] > [Scripts] > [R] und klicken Sie auf den Menüeintrag [Robotics_Examples.py].
Nach dem Import des Code-Beispiels muss das Programm z. B. wie folgt in der USER_PRG.HighPrio() aufgerufen und dabei der vom Anwender in MOVISUITE® vergebene Name des Roboterknotens (z. B. MyRobot) dem Beispielprogramm übergeben werden:
PRG_ExampleCyclicToolTransformation(rInterface_Robot :=
Interface_MyRobot, rRobot := MyRobot);