From the IEC program
The following application example shows how to control the "Positioning" operating mode from the IEC program.
Control
Control the axis in the Positioning structure as follows:
- To activate the operating mode, set xActivate to "TRUE".
- Define the setpoints forlrPosition, lrVelocity, lrAcceleration, and lrDeceleration.
- To start the operating mode, set xStart to "TRUE".
Interface in the IEC Editor
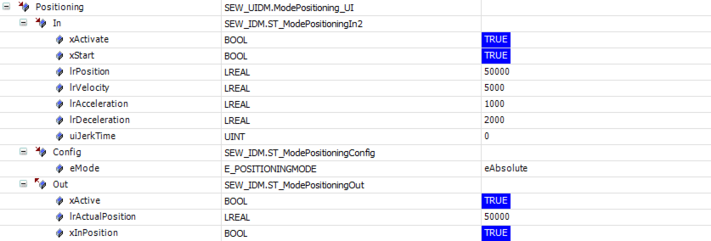
Note:
When xStart has a value of "TRUE", the system accelerates with lrAcceleration. When the target position is reached, you will receive the feedback xInPosition = "TRUE" in the OUT structure. When xStart has a value of "FALSE", the system stops with lrDeceleration. The speed curve is trapezoidal as the drive was moved without jerk time.
Trace recording

[1] | Positioning.In.xActivate |
[2] | Positioning.In.xStart |
[3] | Positioning.In.lrPosition |
[4] | Positioning.In.lrVelocity |
[5] | Positioning.Out.xInPosition |
