Substrukturen stUserInterface
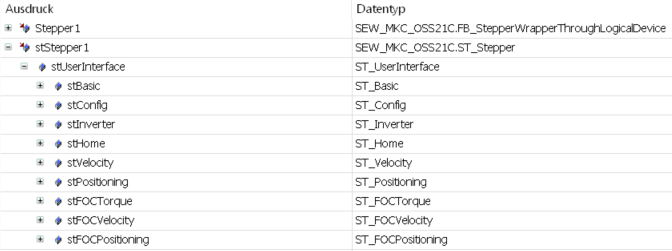
Die Substrukturen von ST_Stepper sind in folgender Tabelle kurz beschrieben. Weitere Informationen finden Sie im Kapitel Verwendete Variablen.
Substruktur | Bedeutung |
|---|---|
|
|
|
|
|
|
|
|
|
Das Betriebsverhalten des Modus lässt sich über |
| In |
|
|
Die lizenzpflichtigen Advanced-Modi sind in folgender Tabelle dargestellt:
Substruktur | Bedeutung |
|---|---|
| Der Motor ist in Closed-Loop Positionsregelung (anhand der ausgelesenen Geberwerte) und versucht die angegebene Sollposition mit der angegeben Sollgeschwindigkeit sowie mit den in stFOCVelocity.stConfig.diCurrentControllerCurrentLimit angegeben Strom zu erreichen. |
| Der Motor ist in Closed-Loop Geschwindigkeitsregelung (anhand der ausgelesenen Geberwerte) und versucht die angegebene Sollgeschwindigkeit mit den in |
| Der Motor ist in Stromregelung und wird über den Sollstrom |
