Substructures stUserInterface
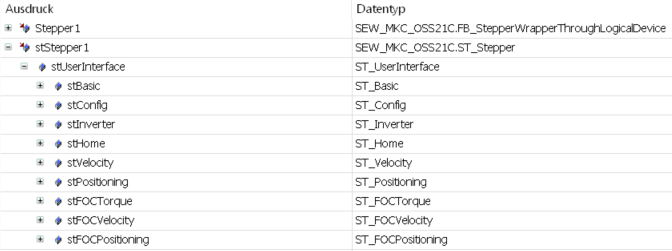
The substructures of ST_Stepper are briefly described in the following table. For further information, refer to chapter Variables used.
Substructure | Meaning |
|---|---|
|
|
|
|
|
|
|
|
|
The Operating behavior of the mode can be influenced via |
| The parameter settings are specified in |
|
|
The advanced modes that require a license are shown in the following table:
Substructure | Meaning |
|---|---|
| The motor is in closed loop positioning control (based on the read out encoder values) and attempts to reach the specified setpoint position with the specified setpoint speed and with the current specified in stFOCVelocity.stConfig.diCurrentControllerCurrentLimit. |
| The motor is in closed loop speed control (based on the read out encoder values) and attempts to reach and maintain the specified setpoint speed with the current specified in |
| The motor is in current control and is controlled via the setpoint current |
