Optimierungsfall 4 – Y-Achse ist Leitachse, Y-Achse ist im Senkbetrieb
Ausgangssituation: tyVmax > txVmax
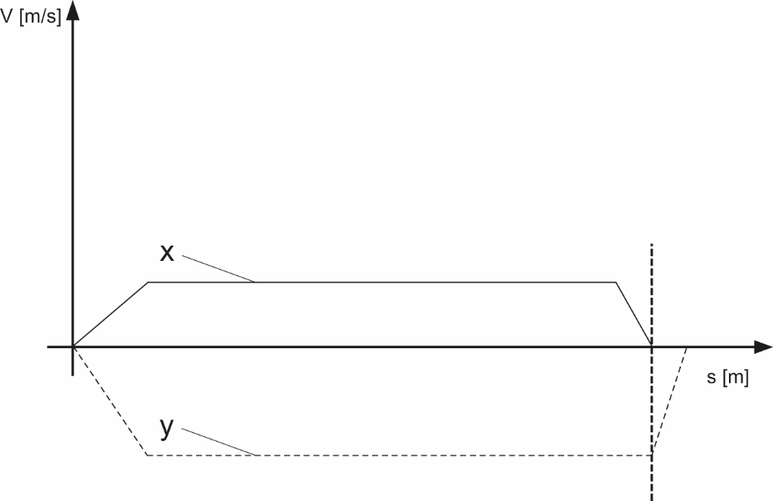
Die Y-Achse ist Leitachse, da sie aufgrund ihres Fahrwegs und den Dynamikparametern eine längere Fahrdauer als die X-Achse hat.
Die Y-Achse ist im Senkbetrieb.
Optimierungsparameter: tyVmax = txVangepasst
Die Y-Achse startet sofort und wird mit maximalen Dynamikparametern betrieben, um die Taktzeit einzuhalten. Die X-Achse startet ebenfalls sofort, wird aber mit einer reduzierten Geschwindigkeit verfahren.
Die Geschwindigkeit der X-Achse wird so berechnet, dass ihre Fahrbewegung mit beginnender Bremsverzögerung der Y-Achse beendet ist.
Energieersparnis:
Durch die Reduzierung der Fahrgeschwindigkeit der X-Achse muss diese weniger Energie aufnehmen. Die im Senkbetrieb der Y-Achse freiwerdende Energie wird der X-Achse zur Verfügung gestellt.
