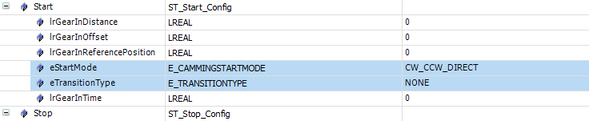
Direkter Einkuppel-Mechanismus
Weiterführende Informationen
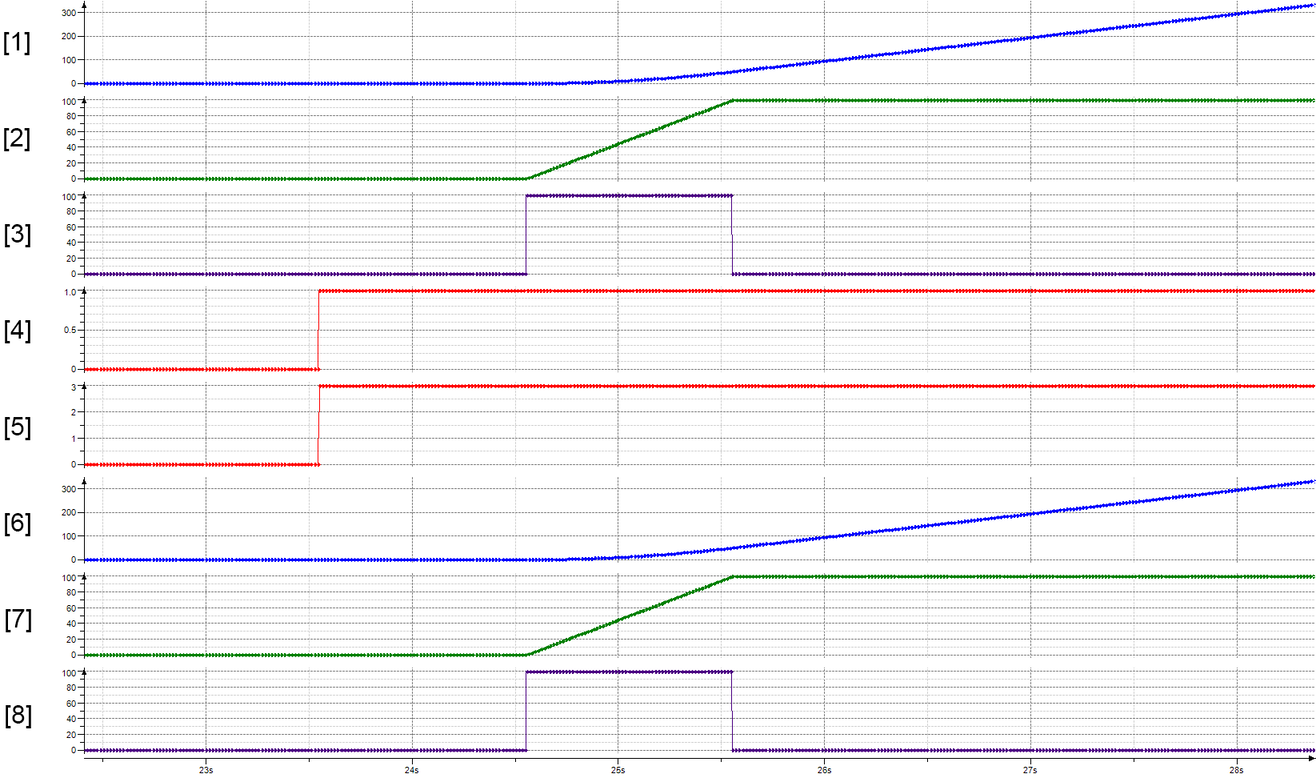
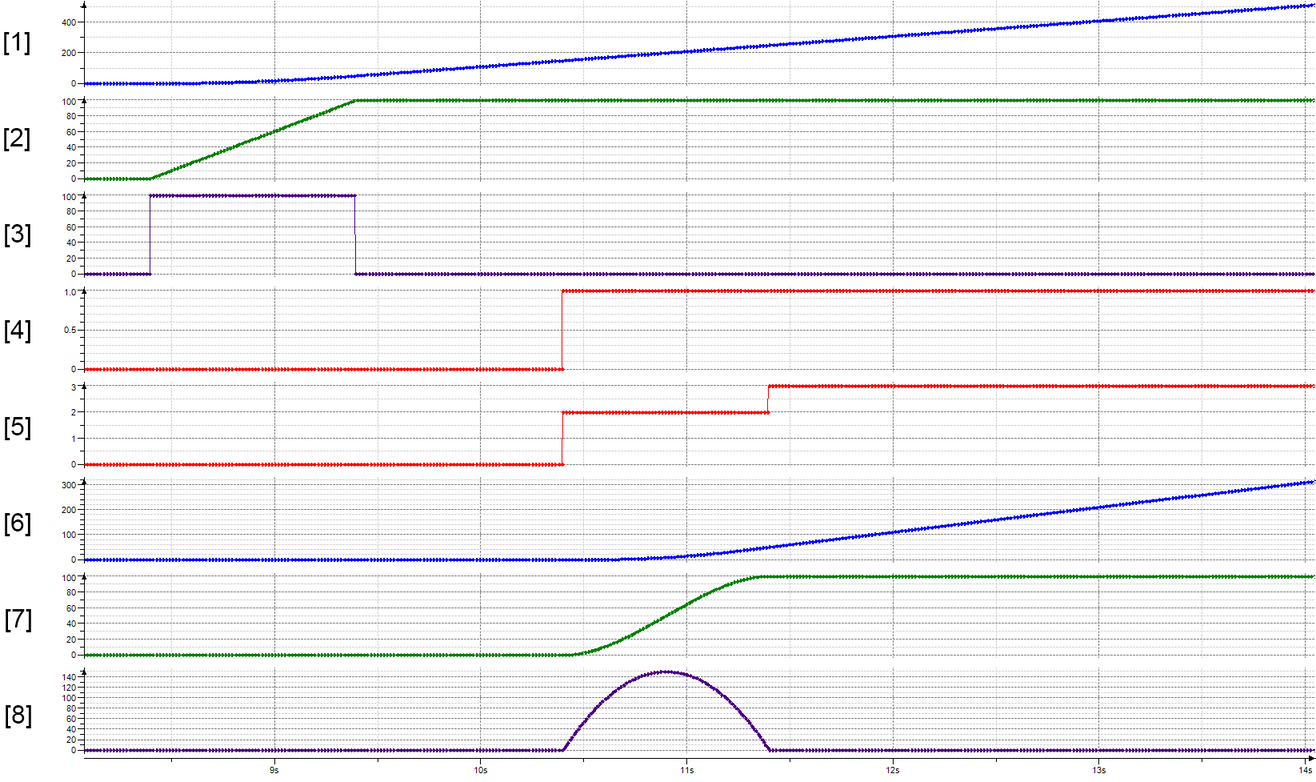
Direkt einkuppeln ohne Transition
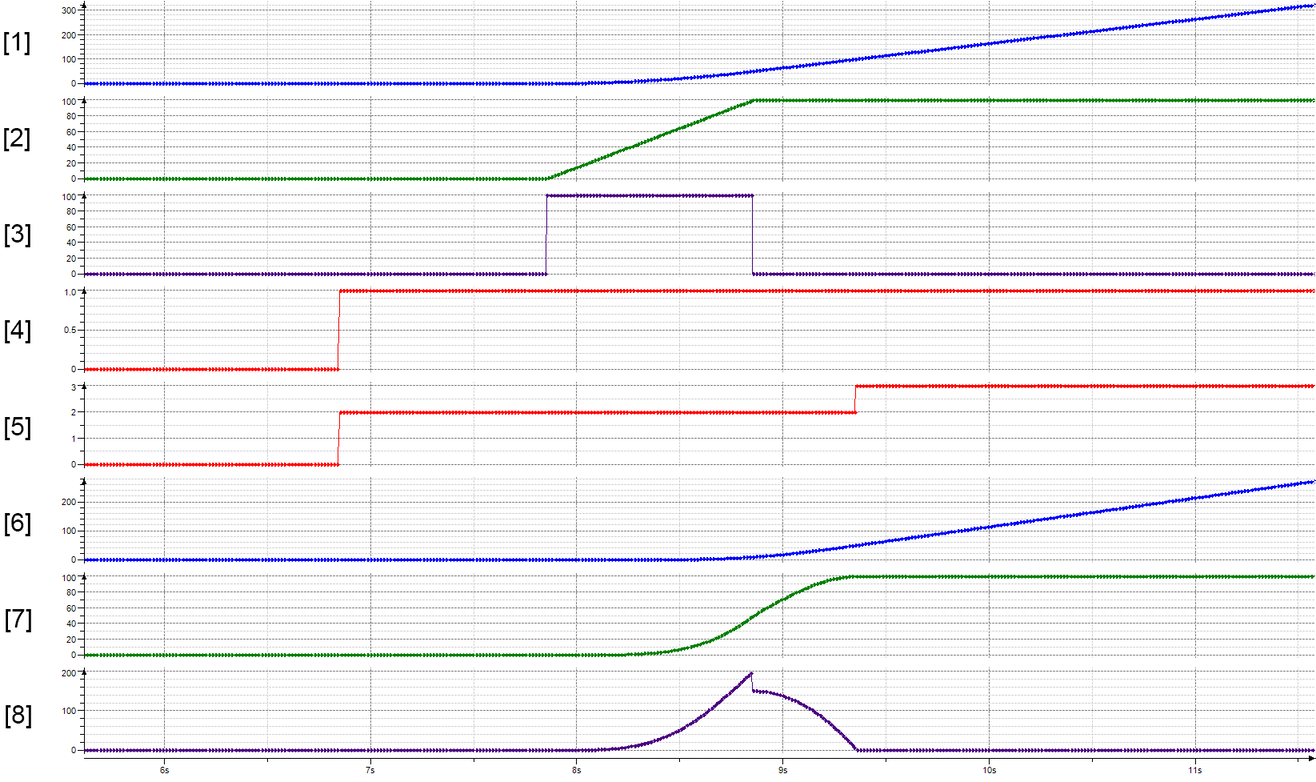
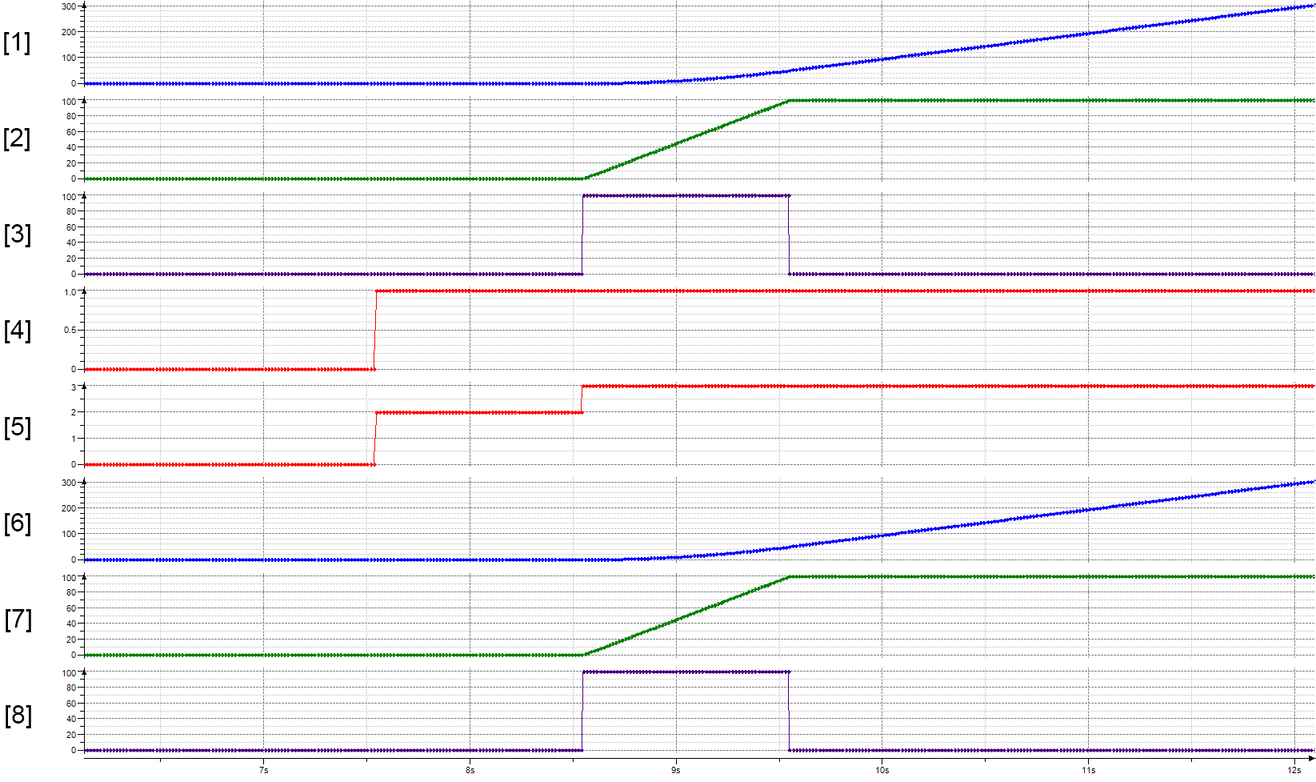
Direkt einkuppeln mit masterbasierter Transition
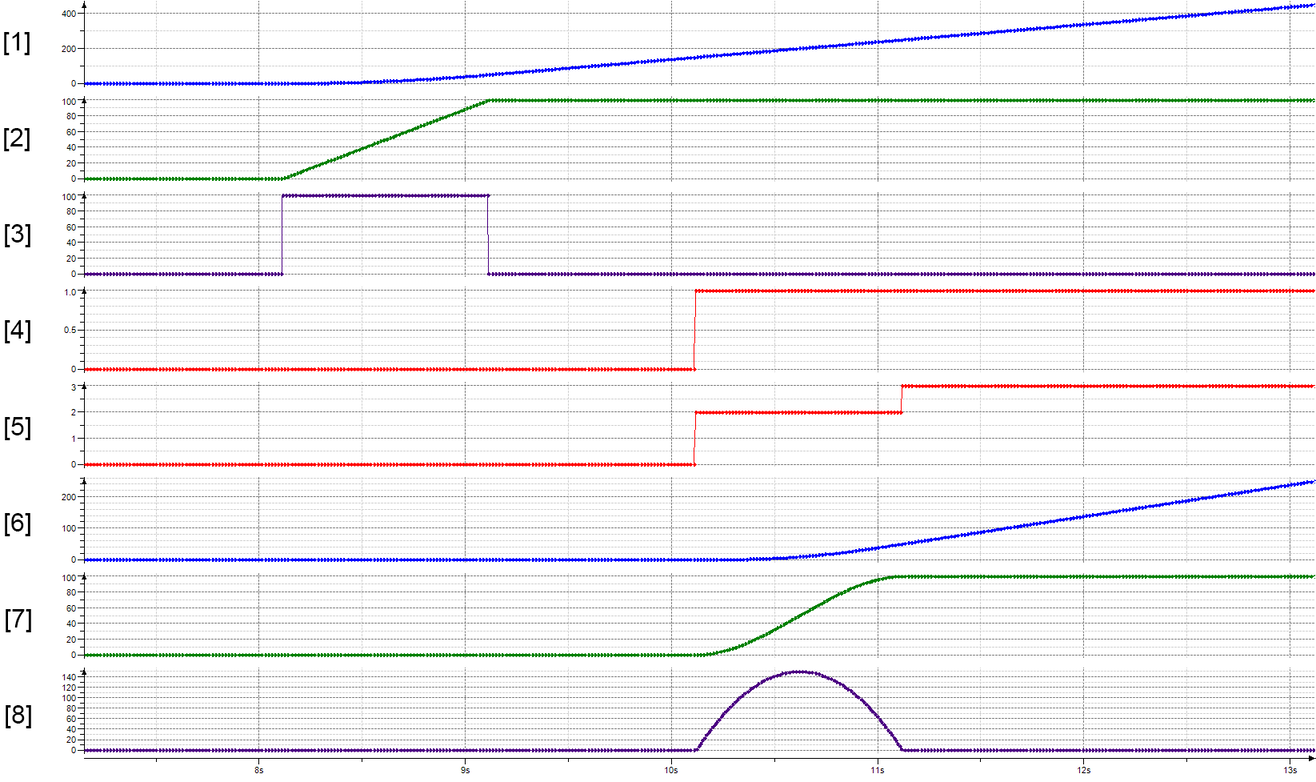
Direkt einkuppeln mit zeitbasierter Transition
MOVIKIT® MultiMotion, MultiMotion Gearing, MultiMotion Camming
Sprache
Deutsch
English
SEW-EURODRIVE
Home
Anwendungsbeispiele
Synchronlauf (Gearing)
Direkter Einkuppel-Mechanismus