Direkt einkuppeln mit masterbasierter Transition
Transitionen werden in der Regel dann verwendet, wenn die Slave-Achse auf eine sich bewegende Master-Achse aufsynchronisieren soll. Zur Vermeidung eines Sprungs in der Geschwindigkeit wird beim Einkuppeln eine Übergangsfunktion verwendet.
Steuern Sie die Achse in der Struktur Gearing.Config.Start folgendermaßen an:
Schnittstelle im IEC-Editor

Ablauf
- Während die Master-Achse sich bewegt, wird das Start-Signal xStart im Mode "Gearing" der Slave-Achse gesetzt.
- Mit der Konfiguration eStartMode = "CW_CCW_DIRECT" und eTransitionType = "MASTERBASED" wechselt der Zustand eGearingState sofort von "STOPPED" (0) nach "GEAR_IN" (2).
- Nachdem die Master-Achse den konfigurierten Einkuppelweg lrGearInDistance = "100.0" zurückgelegt hat, wird die Slave-Achse synchron. Der Zustand eGearingState wechselt von "GEAR_IN" (2) nach "ACTIVE" (3).
- Danach verfährt die Master-Achse während die Slave-Achse ihr folgt.
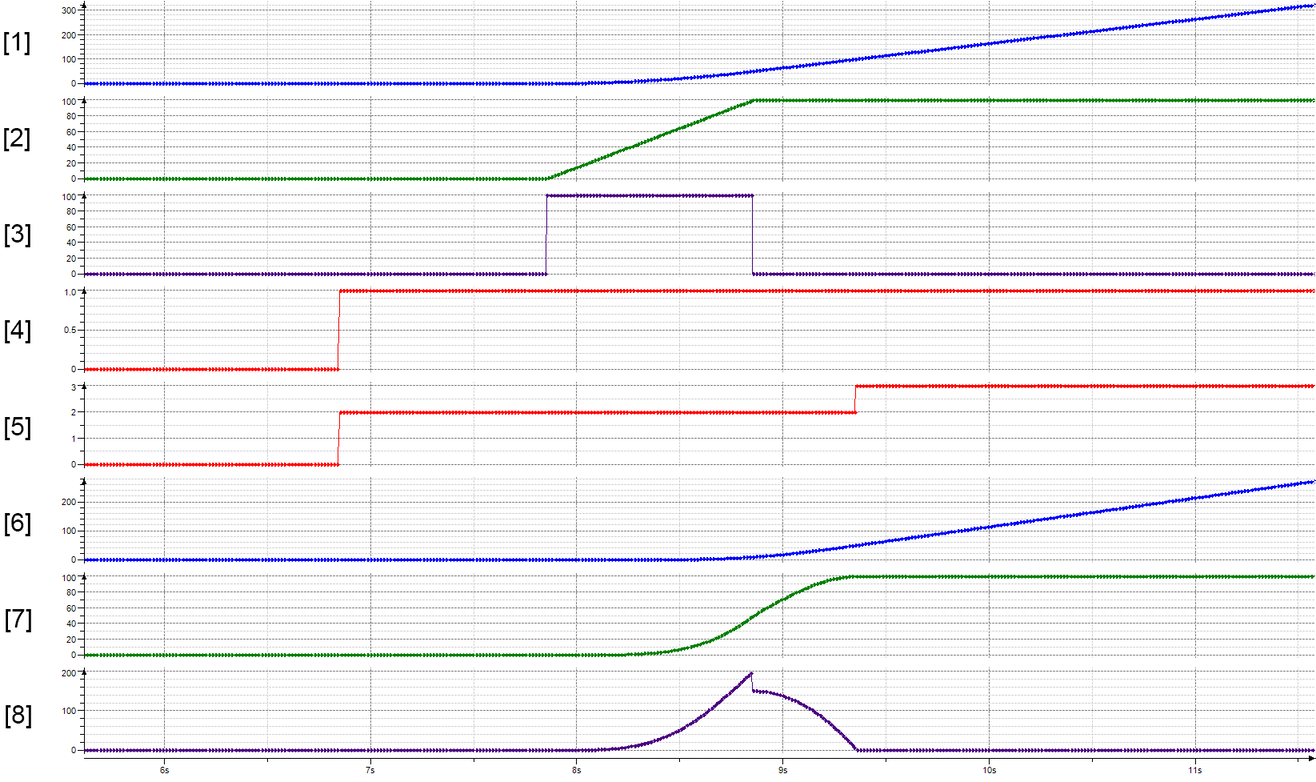
Trace-Aufzeichnung
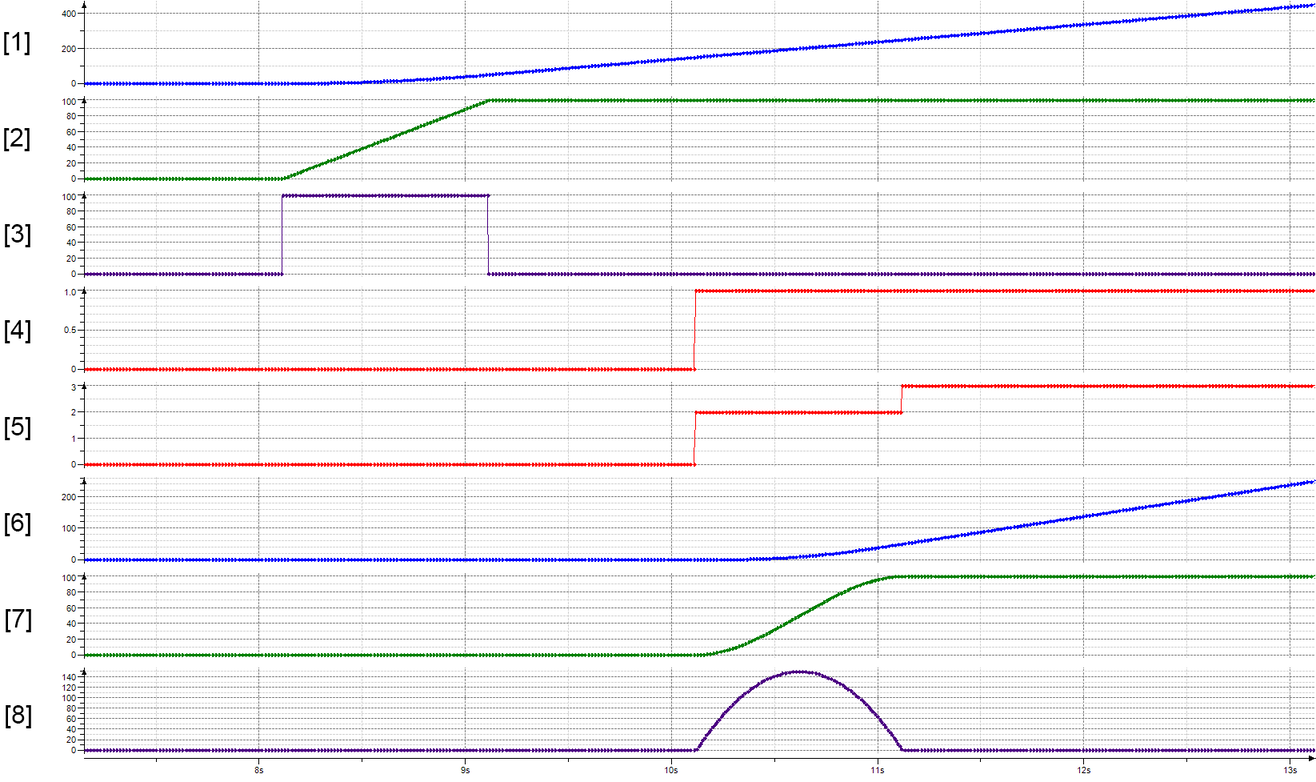
[1] | Position der Master-Achse |
[2] | Geschwindigkeit der Master-Achse |
[3] | Beschleunigung der Master-Achse |
[4] | Start-Signal xStart des Mode Gearing |
[5] | Zustand eGearingState des Mode Gearing |
[6] | Position der Slave-Achse |
[7] | Geschwindigkeit der Slave-Achse |
[8] | Beschleunigung der Slave-Achse |
Entscheidend bei der masterbasierten Transition ist, dass für deren Ausführung eine Bewegung der Master-Achse erforderlich ist. Befindet sich die Master-Achse im Stillstand, dann wird solange in dem Zustand "GEAR_IN" verblieben, bis die Master-Achse den konfigurierten Einkuppelweg zurückgelegt hat.
Ablauf
- Im Stillstand der Master-Achse wird das Start-Signal xStart im Mode "Gearing" der Slave-Achse gesetzt.
- Mit der Konfiguration eStartMode = "CW_CCW_DIRECT" und eTransitionType = "MASTERBASED" wechselt der Zustand eGearingState sofort von "STOPPED" (0) nach "GEAR_IN" (2).
- Dieser Zustand bleibt erhalten, bis die Master-Achse den konfigurierten Einkuppelweg lrGearInDistance = "100.0" zurückgelegt hat. Erst dann wird die Slave-Achse synchron. Der Zustand eGearingState wechselt von "GEAR_IN" (2) nach "ACTIVE" (3).
Trace-Aufzeichnung
[1] | Position der Master-Achse |
[2] | Geschwindigkeit der Master-Achse |
[3] | Beschleunigung der Master-Achse |
[4] | Start-Signal xStart des Mode Gearing |
[5] | Zustand eGearingState des Mode Gearing |
[6] | Position der Slave-Achse |
[7] | Geschwindigkeit der Slave-Achse |
[8] | Beschleunigung der Slave-Achse |
