Direkt einkuppeln mit zeitbasierter Transition
Bei der zeitbasierten Transition erfolgt das Aufsynchronisieren während einer einstellbaren Zeitdauer unabhängig von der Bewegung der Master-Achse.
Steuern Sie die Achse in der Struktur Gearing.Config.Start folgendermaßen an:
Schnittstelle im IEC-Editor

Ablauf
- Während die Master-Achse sich bewegt, wird das Start-Signal xStart im Mode "Gearing" der Slave-Achse gesetzt.
- Mit der Konfiguration eStartMode = "CW_CCW_DIRECT" und eTransitionType = "TIMEBASED" wechselt der Zustand eGearingState sofort von "STOPPED" (0) nach "GEAR_IN" (2).
- Nachdem die konfigurierte Einkuppelzeit lrGearInTime = "1.0" [s] verstrichen ist, wird die Slave-Achse synchron. Der Zustand eGearingState wechselt von "GEAR_IN" (2) nach "ACTIVE" (3).
- Danach verfährt die Master-Achse während die Slave-Achse ihr folgt.
Trace-Aufzeichnung
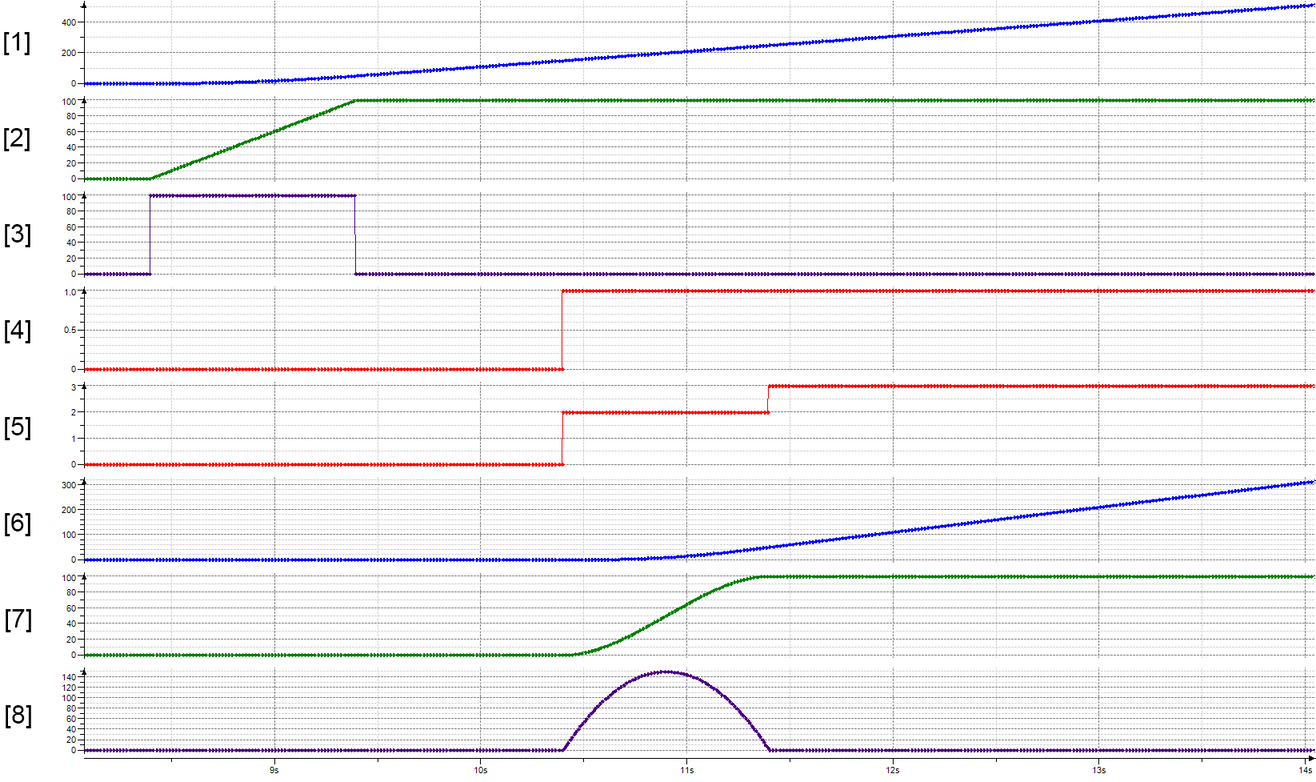
[1] | Position der Master-Achse |
[2] | Geschwindigkeit der Master-Achse |
[3] | Beschleunigung der Master-Achse |
[4] | Start-Signal xStart des Mode Gearing |
[5] | Zustand eGearingState des Mode Gearing |
[6] | Position der Slave-Achse |
[7] | Geschwindigkeit der Slave-Achse |
[8] | Beschleunigung der Slave-Achse |
Entscheidend bei der zeitbasierten Transition ist, dass sie unabhängig von der Bewegung der Master-Achse durchgeführt wird.
Ablauf
- Im Stillstand der Master-Achse wird das Start-Signal xStart im Mode "Gearing" der Slave-Achse gesetzt.
- Mit der Konfiguration eStartMode = "CW_CCW_DIRECT" und eTransitionType = "TIMEBASED" wechselt der Zustand eGearingState sofort von "STOPPED" (0) nach "GEAR_IN" (2).
- Dieser Zustand bleibt erhalten, bis die konfigurierten Einkuppelzeit lrGearInTime = "1.0" [s] verstrichen ist. Erst dann wird die Slave-Achse synchron, auch wenn die Master-Achse steht. Der Zustand eGearingState wechselt von "GEAR_IN" (2) nach "ACTIVE" (3).
Trace-Aufzeichnung
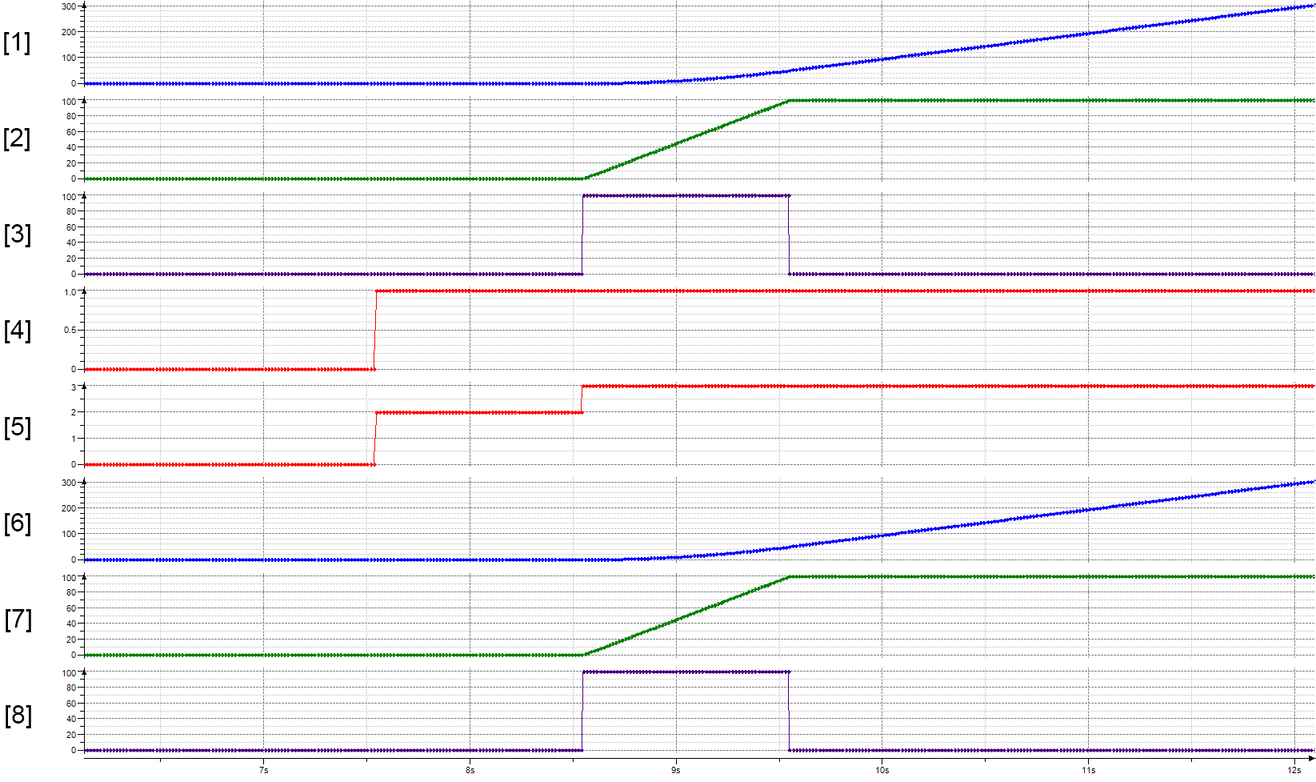
[1] | Position der Master-Achse |
[2] | Geschwindigkeit der Master-Achse |
[3] | Beschleunigung der Master-Achse |
[4] | Start-Signal xStart des Mode Gearing |
[5] | Zustand eGearingState des Mode Gearing |
[6] | Position der Slave-Achse |
[7] | Geschwindigkeit der Slave-Achse |
[8] | Beschleunigung der Slave-Achse |
