Touchprobe POSITIONING
Touchprobe POSITIONING consists of 3 parts:
- The touchprobe command is parameterized in the REG part. Here, among other things, the source (touchprobe is to be triggered on the edge of an inverter touchprobe or a BOOL variable), the mode and the measuring direction are specified. INFORMATION: When the inverter touchprobe is used, it is necessary to connect the sensor to all real axes below the robot (except axes of a MultiAxisController). For further information on parameterizing the touchprobe command, refer to chapter Touchprobe.
- The POSITIONING part specifies the distance (in the measuring direction) that is to be covered after the touchprobe sensor or the triggering BOOL variable is triggered. The specified distance must always be greater than 0 in order to be able to stop the robot in time. If the remaining travel is too small or the robot is traveling so fast that it cannot stop in time even with emergency stop parameters, the robot will enter error state.
- The CONTINUE part specifies up to which position the touchprobe should be active or which segments belong to the POSITIONING path. The MotionPointer "M" indicates which command is currently being carried out. If the MotionPointer "M" reaches the CONTINUE command without a touchprobe event being triggered, the touchprobe is deactivated again. Triggering is then no longer possible. If a touchprobe event is triggered before the CONTINUE command is reached, the program is continued from the CONTINUE position after the sensor-based positioning has been carried out. The ProgramPointer "P" indicates up to which position a program is already interpreted. INFORMATION: When the touchprobe event is triggered, the ProgramPointer "P" must have already interpreted the program at least up to the CONTINUE command.
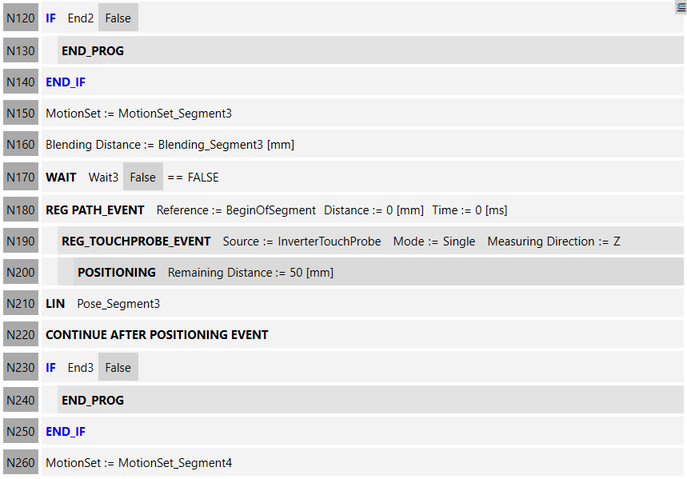
The following application example shows the use of a touchprobe POSITIONING that should be active while the movement to "LIN Pose_Segment3" is carried out.
- The touchprobe is activated as soon as the ProgramPointer "P" interprets the REG command. The example uses a PathEvent to make sure this does not happen too soon.
- In line 180, the PathEvent is inserted, which is triggered at the beginning of the movement to "LIN Pose_Segment3" and activates the touchprobe as an action (lines 190 + 200).
- Subsequently, the touchprobe is parameterized in lines 190 + 200 in such a way that an edge of the inverter touchprobe triggers a sensor-based positioning. The remaining travel is set to 50 mm.
- Touchprobe POSITIONING should be deactivated again after reaching the "POSE_Segment3" position or the program should be continued here after the sensor-based positioning has been carried out. Therefore, the CONTINUE command is inserted in line 220.