Setting the speed limit
Before the torque setpoint is transferred from the setpoint source to the control mode, it passes through various limitations. In order not to exceed the speed limit (nmax), the torque is continuously reduced internally along a straight line near the speed limit.
The range of the internal torque limitation △n is calculated as follows:

with:
Jtotal = Jmotor+brake + Jload
Jload[kgm2] = mass moment of inertia of load (index 8404.13)
Jmotor+brake[kgm2] = inertia of motor and brake (index 8360.47)
Kp[1/s] = P gain for speed controller (index 8404.4)
Example:
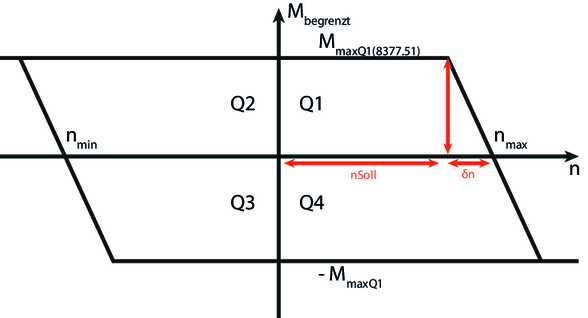
A motor should reach the torque specified via PO10 (△Msetpoint) in the speed range 0 up to a defined speed (nsetpoint). The following maximum speed (nmax) is to be specified via PO2 so that the torque is not prematurely limited internally:
nmax = nsetpoint + △n
This results in the behavior shown below. Below the speed nsetpoint, the inverter can deliver the setpoint torque specified via PO10. Above nsetpoint, i.e. in the range △n, the torque is continuously limited internally up to the "Maximum speed" (nmax) specified via PO2.
INFORMATION