"Rapid stop" subfunction (only with control via RS485)
- With control via RS485, the "apply brake during downward ramp" function is introduced. This functionality is assigned to bit 9 in the control word as virtual terminal in line with MOVILINK® profile.

1) Recommendation for all bits that are not assigned = "0" |
- When bit 9 is set during the downward ramp, the MOVIMOT® inverter applies the brake (directly via the brake output or via the MOVIMOT® signal relay output) and blocks the output stage.
- If the motor frequency is less than the stop frequency, the brake is applied at the downwards ramp, regardless of the status of bit 9.
- After activating the rapid stop, enable may only be granted again after the drive has come to a standstill.
Brake control flow diagram with the subfunction "rapid stop" (control via RS485):
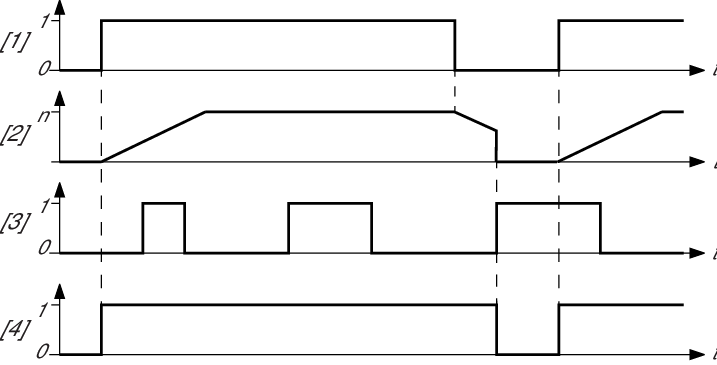
[1] | Enable terminals/control word |
[2] | Speed |
[3] | Bit 9 |
[4] | Brake control signal: "1" = open, "0" = closed |
