Behavior during synchronization
The MC_GearInPos.RampInMode parameter of the E_RampInMode type defines the behavior during synchronization. It can have the following settings:
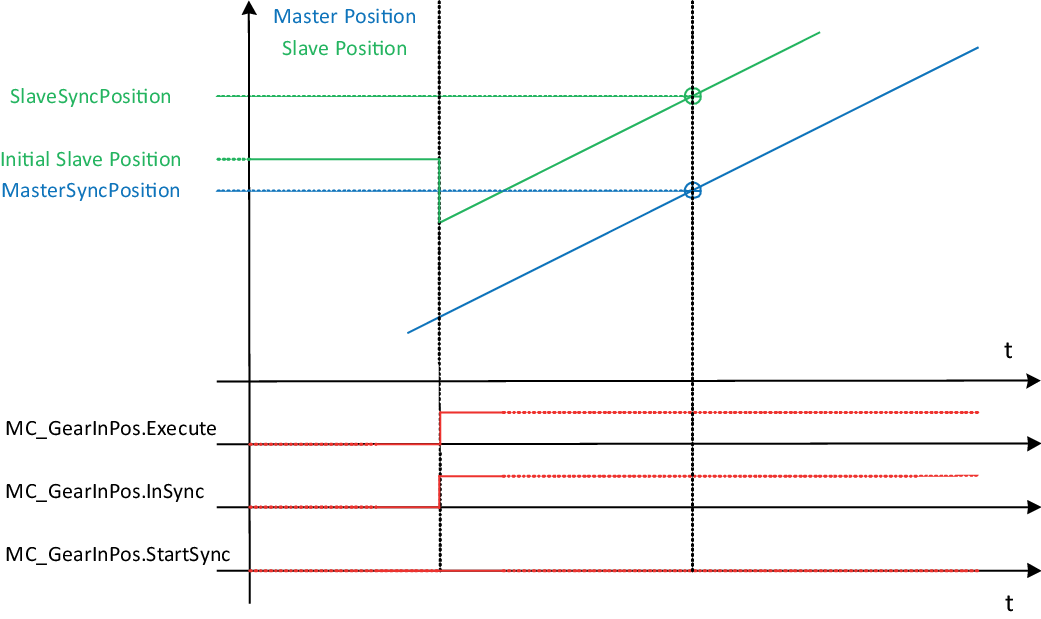
- 1: RampInMode = eDirect
- With a rising edge at MC_GearInPos.Execute, the slave axis synchronizes by jumping to the straight lines specified by the parameters MasterSyncPos, SlaveSyncPos, as well as by RatioNumerator and RatioDenominator. This can result in a jump in speed and/or position, even if the master and slave axes are in an idle state at the time of the rising edge at MC_GearInPos.Execute.

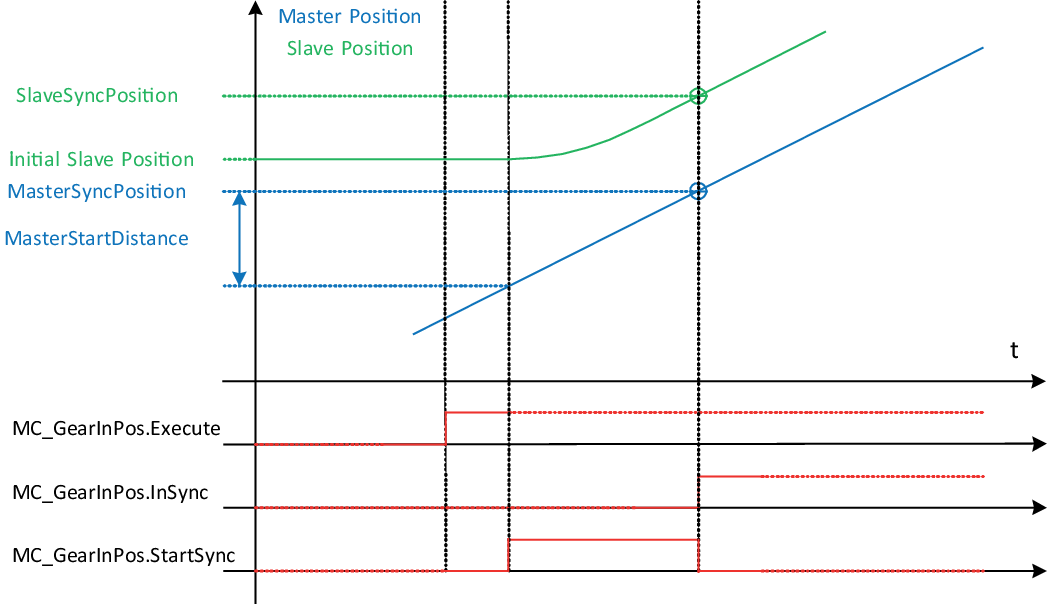
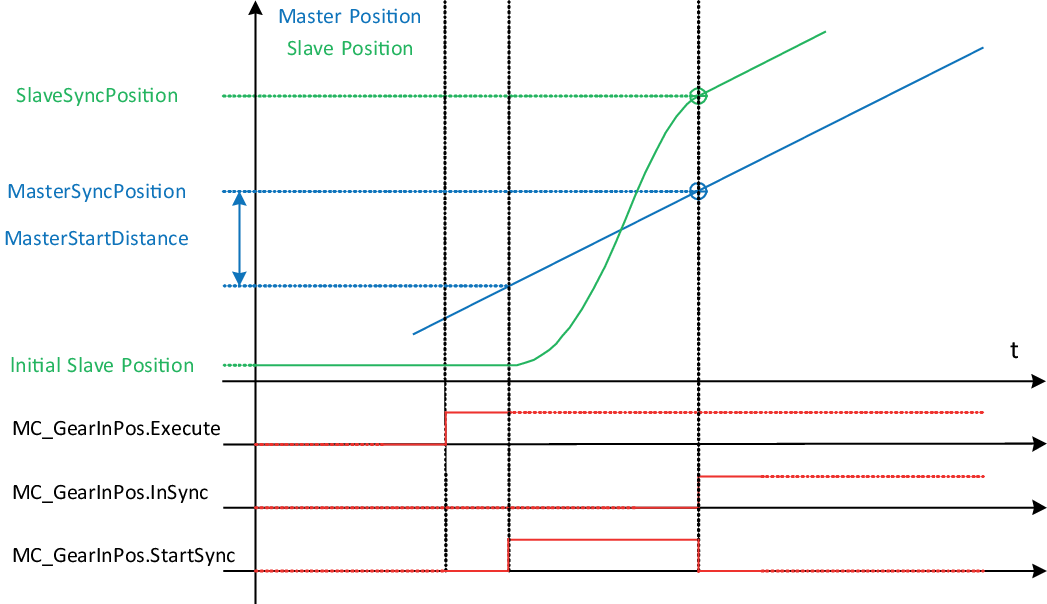
- 2: RampInMode = eMasterBased
- Master-based synchronization begins when the master axis is the distance MasterStartDistance away from the MasterSyncPos. Then MC_GearInPos.StartSync becomes TRUE. As soon as the master axis reaches the MasterSyncPos and the slave axis reaches the SlaveSyncPos, they are synchronous. This makes MC_GearInPos.InGear TRUE and MC_GearInPos.StartSync FALSE. The slave axis therefore always attempts to synchronize from its initial state, while the master axis covers the distance MasterStartDistance. It depends on the boundary conditions whether this is successful or whether the slave axis might exceed an application limit, e.g. due to excessive acceleration.
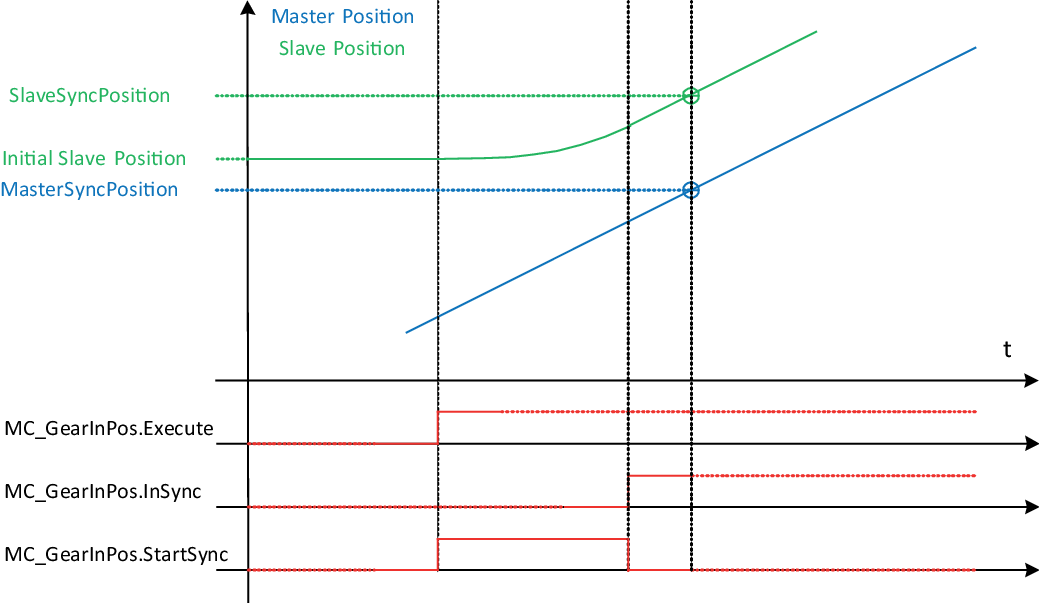
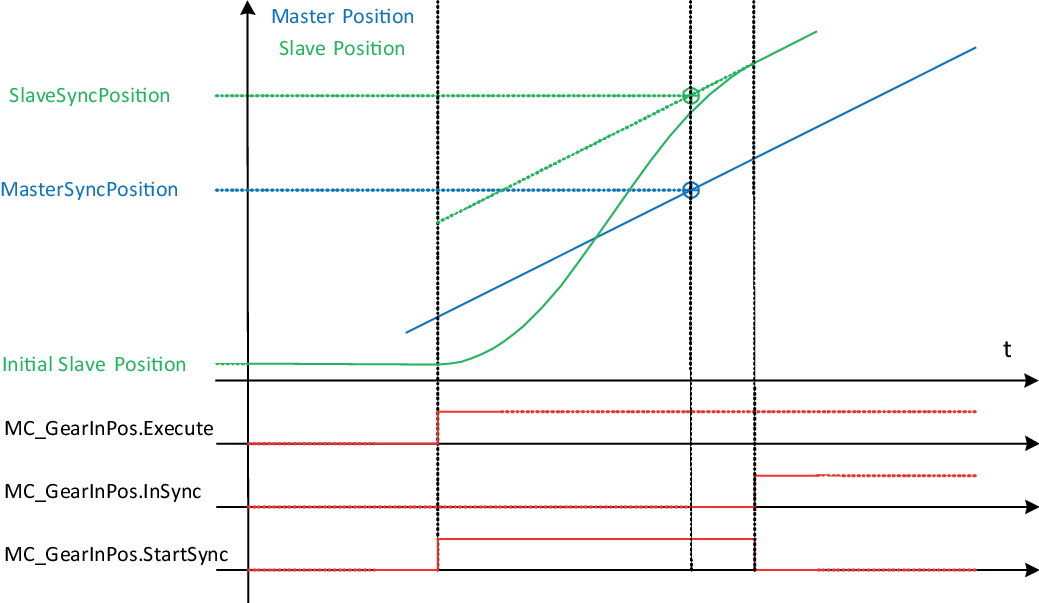
- 3: RampInMode = eProfileBased
- Profile-based synchronization begins with a rising edge at MC_GearInPos.Execute, in which case MC_GearInPos.StartSync becomes TRUE. The parameters RampInVelocity, RampInAcceleration, RampInDeceleration and RampInJerk have an effect during profile-based synchronization. Based on these parameters, a transition profile is determined that leads to the straight line specified by the parameters MasterSyncPos, SlaveSyncPos, as well as by RatioNumerator and RatioDenominator. It depends on the boundary conditions when and at which position the slave axis is synchronous. This can occur before reaching MasterSyncPos and SlaveSyncPos, or only afterwards.