Reference travel
For the referencing of axes, a controller-based reference travel is available for all axis types (MOVI-C® axis, virtual axis, CiA402 axis). Reference travel is realized via the MOVI-C® CONTROLLER. The inverter-based reference travel is available additionally for MOVI-C® axes. This uses the inverter function FCB 12 to reference the axis.
You can select from several reference travel types. All reference travel settings can also be specified from the application at any time using the MC_SEW_ConfigHoming function block. The settings in the logical device are transferred to the inverter when the MOVI-C® CONTROLLER is started.
For reference travel types with reference cams or limit switches, the sensors must be wired to the following inputs of the inverter:
- Reference cam – DI 03
- Negative limit switch – DI 04
- Positive limit switch – DI 05
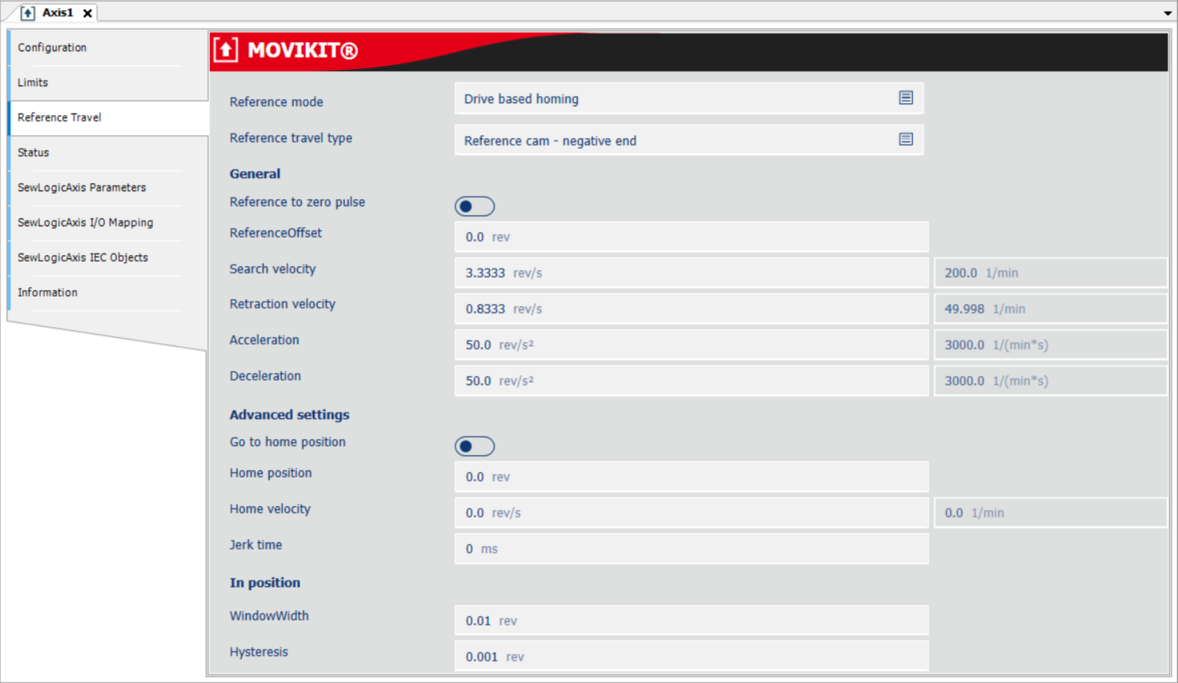
Depending on the axis type, the parameters described below are written to the inverter in non-volatile memory when the MOVI-C® CONTROLLER starts up:
Parameter designation | Description |
|---|---|
Reference mode | Setting of the referencing mode type:
|
Reference travel type | Setting of the reference travel type:
|
|
|
General | |
Reference to zero pulse | Setting for whether the zero pulse (reference pulse of the encoder) is used as the reference point. The parameter is used for the following reference travel types:
|
Reference offset | Reference offset in user units |
Search velocity | Speed in user units used to search for a reference cam or hardware limit switch. |
Retraction velocity | Speed in user units used during reference travel in the following cases:
|
Acceleration | Acceleration at start or direction of rotation reversal of reference travel |
Deceleration | Deceleration for stopping or direction of rotation reversal during reference travel |
Advanced settings | |
Go to home position | Setting for whether a home position should be approached after reference travel.
|
Home position | Home position |
Home velocity | Homing speed |
Jerk time | Jerk time |
In position | |
Window width | Position window for homing |
Hysteresis | Position hysteresis for homing |
Velocity changeover before fixed stop | Trigger for switching from search speed to retraction speed:
|
Dwell time at fixed stop | Duration in ms of how long the drive remains at the fixed stop once the value defined in the "Torque limit at fixed stop" parameter is reached. The drive is only referenced after this time. |
Torque limit at fixed stop | Torque limit in % of nominal motor torque for referencing to fixed stop. Once this limit is reached, the drive remains at the fixed stop for as long as defined in the "Dwell time at fixed stop" parameter. |
