Reference Travel
Zum Referenzieren von Achsen steht für alle Achstypen (MOVI-C Achse, virtuelle Achse, CiA402 Achse) eine controller-basierte Referenzfahrt zur Verfügung. Die Referenzfahrt wird über den MOVI-C® CONTROLLER realisiert. Für MOVI-C®-Achsen steht zusätzlich die umrichter-basierte Referenzfahrt zur Verfügung. Diese nutzt zum Referenzieren der Achse die Umrichterfunktion FCB 12.
Es stehen mehrere Referenzfahrttypen zur Auswahl. Alle Einstellungen zur Referenzfahrt können jederzeit auch aus der Applikation über den Funktionsbaustein MC_SEW_ConfigHoming vorgegeben werden. Die Einstellungen im logischen Gerät werden beim Starten des MOVI-C® CONTROLLER in den Umrichter übertragen.
Bei den Referenzfahrttypen mit Referenznocken oder Endschaltern, müssen die Sensoren auf die folgenden Eingänge des Umrichters verdrahtet werden:
- Referenznocke - DI 03
- Endschalter negative - DI 04
- Endschalter positive - DI 05
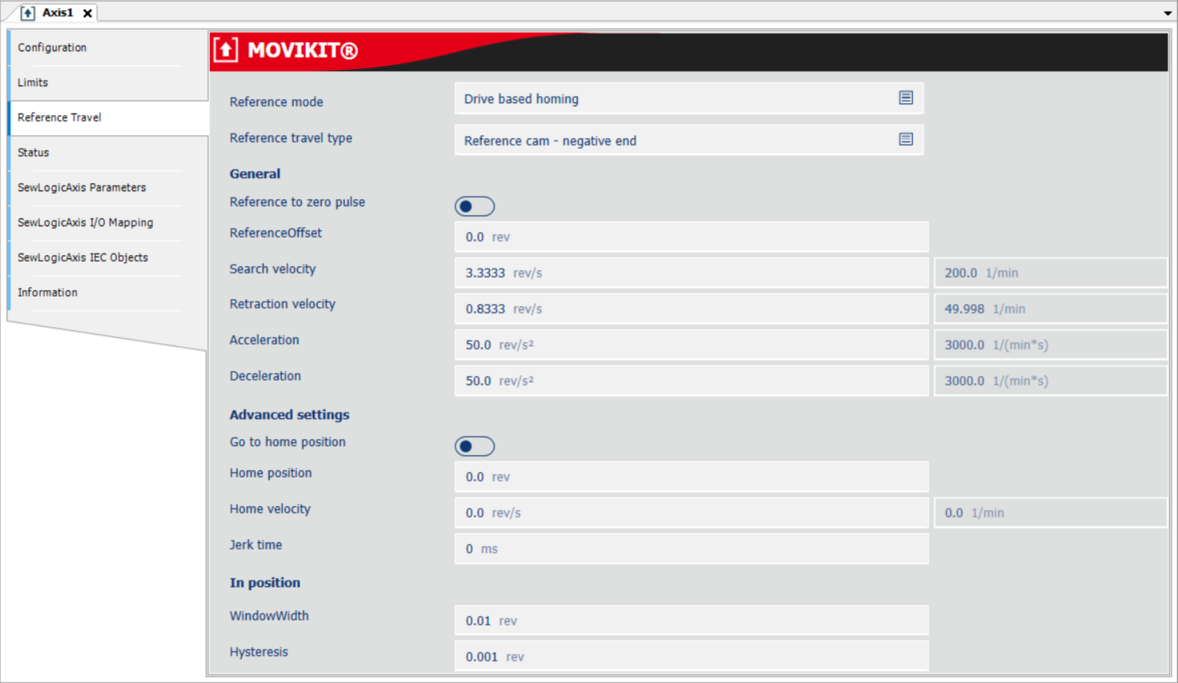
Die nachfolgend beschriebenen Parameter werden abhängig vom Achstyp beim Hochlauf des MOVI-C® CONTROLLER nicht flüchtig in den Umrichter geschrieben:
Parameterbezeichnung | Beschreibung |
|---|---|
Reference mode | Einstellung der Rerenzierbetriebsart:
|
Reference travel type | Einstellung des Referenzfahrttyps:
|
|
|
General | |
Reference to zero pulse | Einstellung, ob der Nullimpuls (Referenzimpuls des Gebers) als Bezugspunkt verwendet wird. Der Parameter wird bei folgenden Referenzfahrtarten verwendet:
|
Reference offset | Referenzoffset in Anwendereinheiten |
Search velocity | Geschwindigkeit in Anwendereinheiten, die zum Suchen eines Referenznockens oder Hardware-Endschalters verwendet wird. |
Retraction velocity | Geschwindigkeit in Anwendereinheiten, die während der Referenzfahrt in folgenden Fällen verwendet wird:
|
Acceleration | Beschleunigung beim Start oder Drehrichtungsumkehr der Referenzfahrt |
Deceleration | Verzögerung zum Anhalten oder Drehrichtungsumkehr während der Referenzfahrt |
Advanced settings | |
Got to home position | Einstellung, ob nach dem Referenzieren die Grundstellung angefahren werden soll.
|
Home position | Grundposition |
Home velocity | Grundstellungsgeschwindigkeit |
Jerk Time | Ruckzeit |
In position | |
Window width | Positionsfenster für die Grundstellungsfahrt |
Hysteresis | Positionshysterese für die Grundstellungsfahrt |
Velocity changeover before fixed stop | Auslöser zum Wechseln von Suchgeschwindigkeit auf Rückzugsgeschwindigkeit:
|
Dwell time at fixed stop | Zeitdauer in ms, wie lange der Festanschlag angefahren bleibt, sobald der im Parameter Drehmomentgrenze Festanschlag definierte Wert erreicht ist. Erst nach dieser Zeit wird der Antrieb referenziert. |
Torque limit at fixed stop | Drehmomentgrenze in % Motornennmoment zum Referenzieren auf Festanschlag. Nach Erreichen dieser Grenze bleibt der Festanschlag so lange angefahren, wie im Parameter "Dwell time at fixed stop" definiert ist. |
