Hardware limit switch
The following diagram and the corresponding explanation illustrate the behavior of the software module when using hardware limit switches in connection with the "Skew priority".
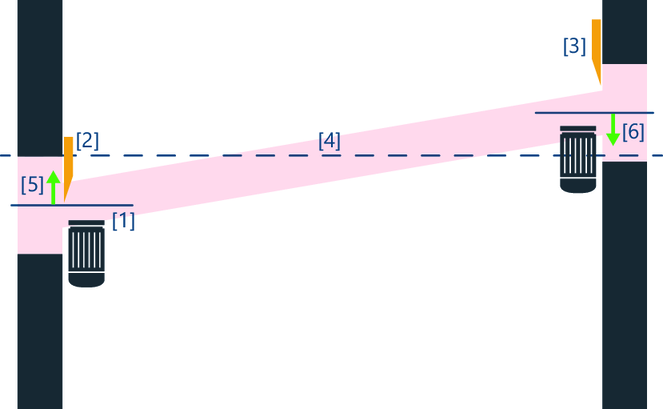
The left drive with actual position [1] has hit its hardware limit switch [2]. However, the hardware limit switch of the right drive [3] has not yet been reached due to a non-symmetrical assembly despite a skew error. If the error is now acknowledged due to the hit limit switch [2], the skew error is compensated if it is in the skew error window.
When compensating the skew error, the left drive moves upwards toward the center line [4] by the position difference [5] and the right drive moves downwards toward the center line [4] by the position difference [6]. This means that the left drive continues to move into its hardware limit switch [2] without issuing another error.
However, if the hardware limit switch [3] has not yet been triggered as opposed to the scenario shown above, and if this hardware limit switch is hit due to skew compensation, an error is issued and the application is brought to a standstill.
