Skew priority
In "Skew priority", the position is balanced between the axis group members. This priority is used when the connection of the drives does not allow one drive to exert force on the other drives, or only to a small extent. These framework conditions apply to connections between drives with clearance and with low stiffness (e.g. dual-column hoists, SRS hoists, indoor cranes).
Example
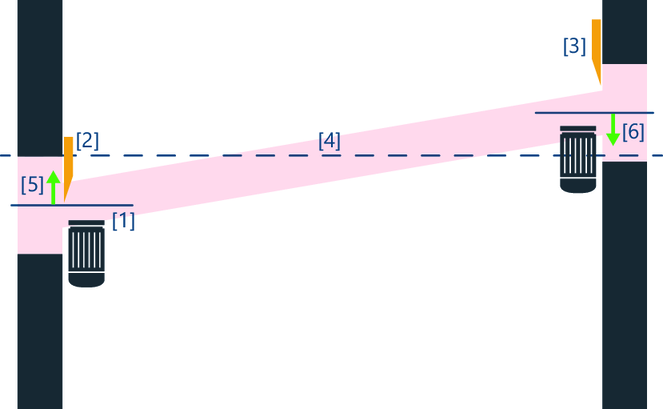
The following application illustration shows an example configuration for "Skew priority":

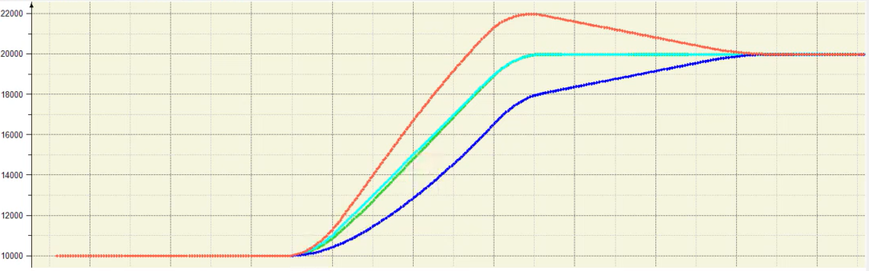
A dual-column hoist is moved by 2 drives that are connected to the load handling device via the cables. The cables provide no rigid connection between the drives. To establish a fixed reference between the drive position and its surroundings, they are equipped with external encoders. In such structures, skews or misalignments between axis group members may cause damage. This is why the position between both sides should be balanced. In "Skew priority", the software module compensates for position differences (e.g. due to the elasticity of the cable or belt, drive overload, slipping of a drive, freewheeling of a drive, etc.) by means of a configurable compensation movement.