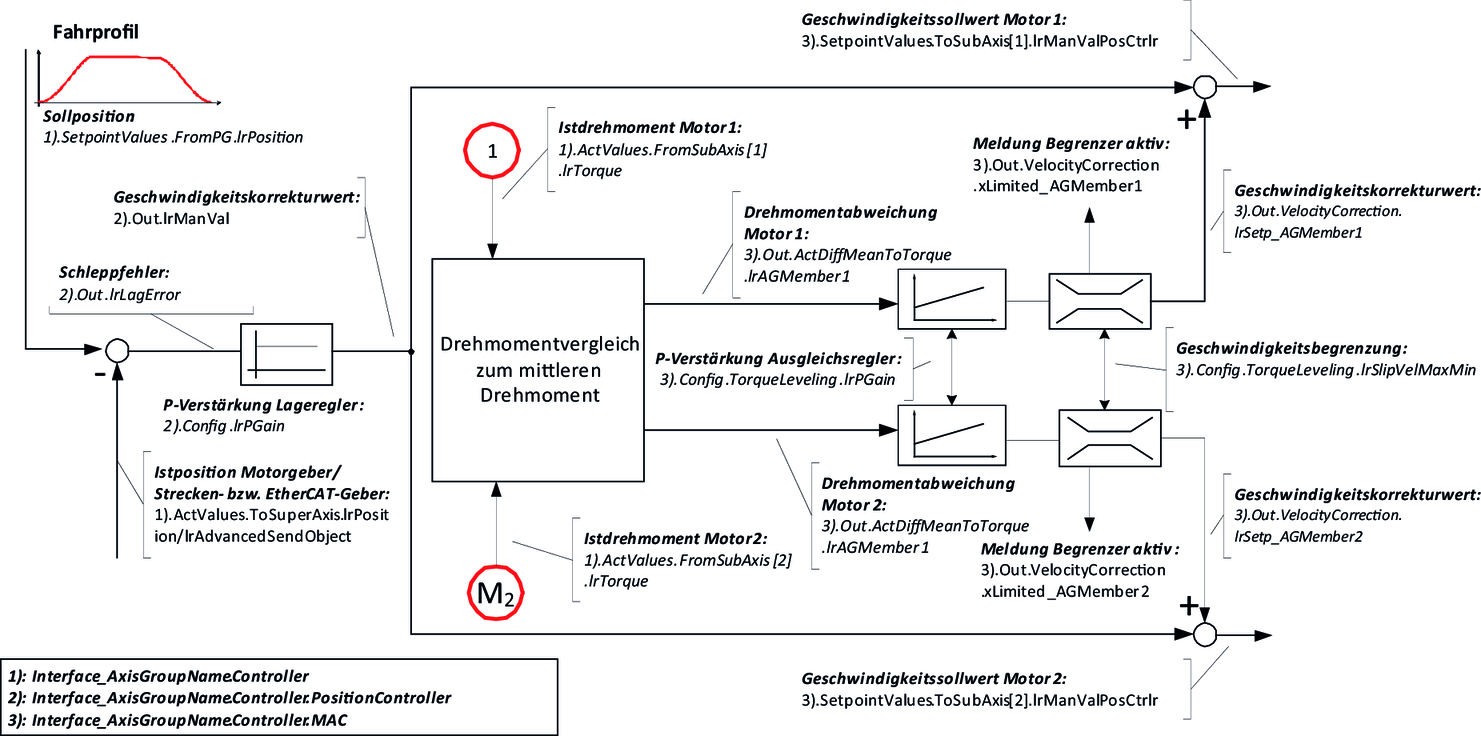
Priorität Drehmoment
In der Betriebsart "Priorität Drehmoment" erfolgt zwischen den Achsgruppenteilnehmern ein Ausgleich des Drehmoments. Die Betriebsart wird eingesetzt, wenn die Verbindung der Antriebe es zulässt, dass ein Antrieb erhebliche Kraft auf die anderen Antriebe ausübt. Diese Rahmenbedingungen sind bei Verbindungen zwischen Antrieben ohne Spiel und mit hoher Steifigkeit gegeben (z. B. traktionsoptimierte Fahrzeuge, RBG-Fahrantriebe, Kurvengänger, ausfallsichere redundante Antriebssysteme, bei glatter oder schlechter Fahrbahn, Takttische).
Beispielanwendung
Die folgende Anwendungsskizze zeigt eine Beispielskonstellation für die Betriebsart "Priorität Drehmoment":
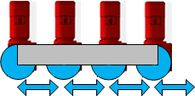
Ein Fahrzeug wird von 4 Antrieben bewegt. Die Antriebe sind über Antriebsaufhängungen mit dem Fahrzeug verbunden. Zwischen den Antrieben gibt es eine reibschlüssige, starre Verbindung über den Boden. Bei einer synchronisierten Bewegung der Antriebe entstehen somit durch Inhomogenität des realen Systems (Raddurchmesser, Reibungskoeffizienten, …) unterschiedliche Belastungen an den Achsgruppenteilnehmern. In der Betriebsart "Priorität Drehmoment" gleicht das Softwaremodul diesen Belastungsunterschied aus.
Weitere Anwendungen
Folgende Anwendungen und Funktionen werden mit dieser Betriebsart realisiert:
- Drehmomentenverteilung
- Gleichlauf mit Drehmomentverteilung
- Lastaufteilung, Lastverteilung
- Starre Kopplung der Antriebe, ehemals Drehmomentslave
- Lastausgleich, ehemals Master-Slave
- Drehzahlgleichlauf (Lageregler und Ausgleichsregler ausschalten)
- Drehmomentfolger
- Drehmomententkoppplung
- Verspannung zwischen Antrieben online einstellbar (Elektronisches –Differential)
- Parametrierbare Differentialsperre
- ASR (Ersetzen der ASR-Software der Generation B)
- Redundante Antriebssysteme durch das Deaktivieren eines beliebigen Achsgruppenteilnehmers im Wartungsfall.
- Traktionsoptimierung (z. B. bei schlechten Fahrbahnen oder bei hoher Dynamik)