Funktionsweise
Zu Beginn des Einschaltvorgangs erfasst die Baugruppe des Absolutwertgebers die absolute Lage. Daraus kann der Umrichter für Synchronmotoren die Kommutierungsinformation errechnen. Der Umrichter liest diese Lage-Information über eine RS485-Verbindung (Parameterkanal) aus und setzt einen Zählerstand. Ausgehend von diesem Absolutwert werden die Positionsänderungen über die Spuren des sin-/cos-Gebers erfasst und analog über den Prozessdatenkanal an den Umrichter übertragen. Weitere Abfragen der Absolutposition erfolgen dann nur noch zyklisch zur Plausibilitätsüberwachung.
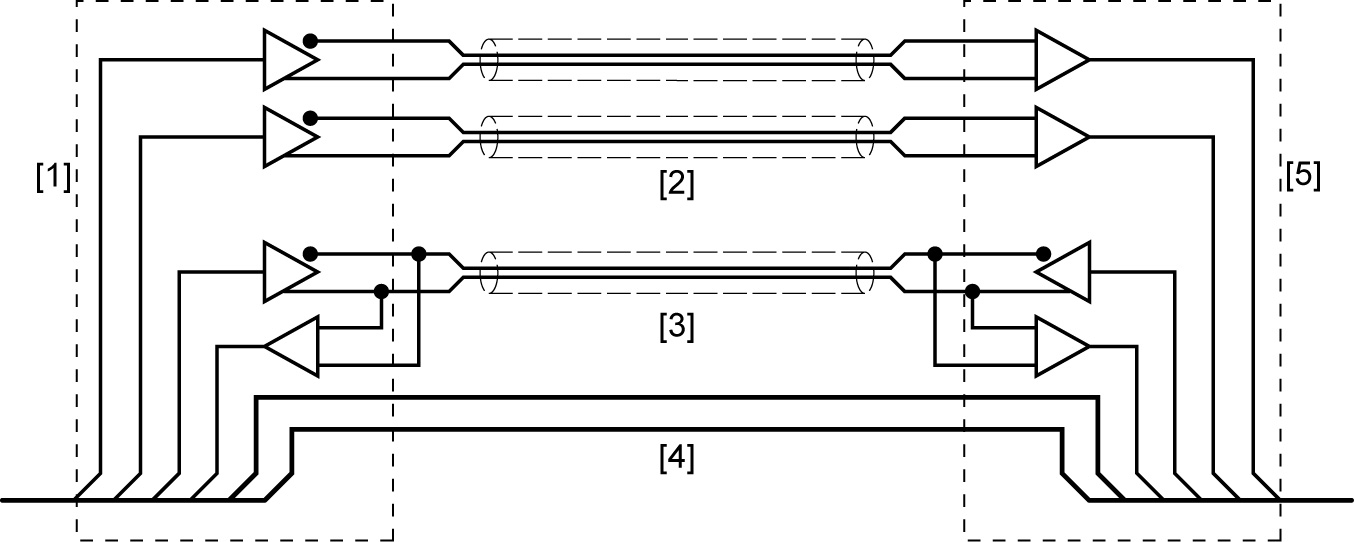
[1] Gebersysteme |
[2] sin-/cos-Signal |
[3] Parameterkanal RS485 |
[4] Versorgungsspannung |
[5] Umrichter |
Ein Umrichter mit asynchron-serieller Schnittstelle erhält über den Parameterkanal sowohl die Lageinformation als auch den Zeitpunkt, für den diese Position gilt. Parallel dazu werden ständig die einlaufenden Analogsignale (sin-/cos-Signale) auf dem Prozessdatenkanal empfangen und gezählt.
Der Geber ist wahlweise als Single- oder Multi-Turn-Variante ausgeführt. Single-Turn bedeutet, dass die Information der Absolutposition sich immer nur auf eine Umdrehung bezieht. Die Multi-Turn-Variante des Gebers kann über nachgeschaltete, untersetzte Codescheiben oder mithilfe eines elektronischen Umdrehungszählers zusätzlich noch Auskunft über die Anzahl der Umdrehungen (typisch z. B. 4096) geben. Je nach Umrichter erfolgt somit z. B. nach der maximalen Anzahl der Geberumdrehungen ein Geberüberlauf, der jedoch im nichtflüchtigen Speicher (NVS) des Umrichters mitgezählt wird. Bis zu 256 Geberüberläufe werden gespeichert (bei 4096 Umdrehungen). Wenn die Spannung an den Versorgungspins unter einen Grenzwert abfällt (z. B. bei Netzausfall), so erkennt dies der NVS und die Daten werden nullspannungssicher gespeichert.
Überlaufbeispiel:
Im Moment des Wiedereinschaltens gibt der EEPROM im Umrichter Folgendes aus:
- Den Absolutwert innerhalb eines Überlaufs (typisch 4096 × 4096)
- Die Anzahl der Überläufe (0 – 255)
Wird nach Wegnahme der Versorgungsspannung der Antrieb, der sich kurz vor einem Überlauf befindet, über den Geberüberlaufpunkt verschoben, besteht beim Wiedereinschalten eine Diskrepanz zwischen den erfassten und den abgelegten Absolutwert. Die Geberelektronik korrigiert daraufhin automatisch die gespeicherten mit den erfassten Werten.
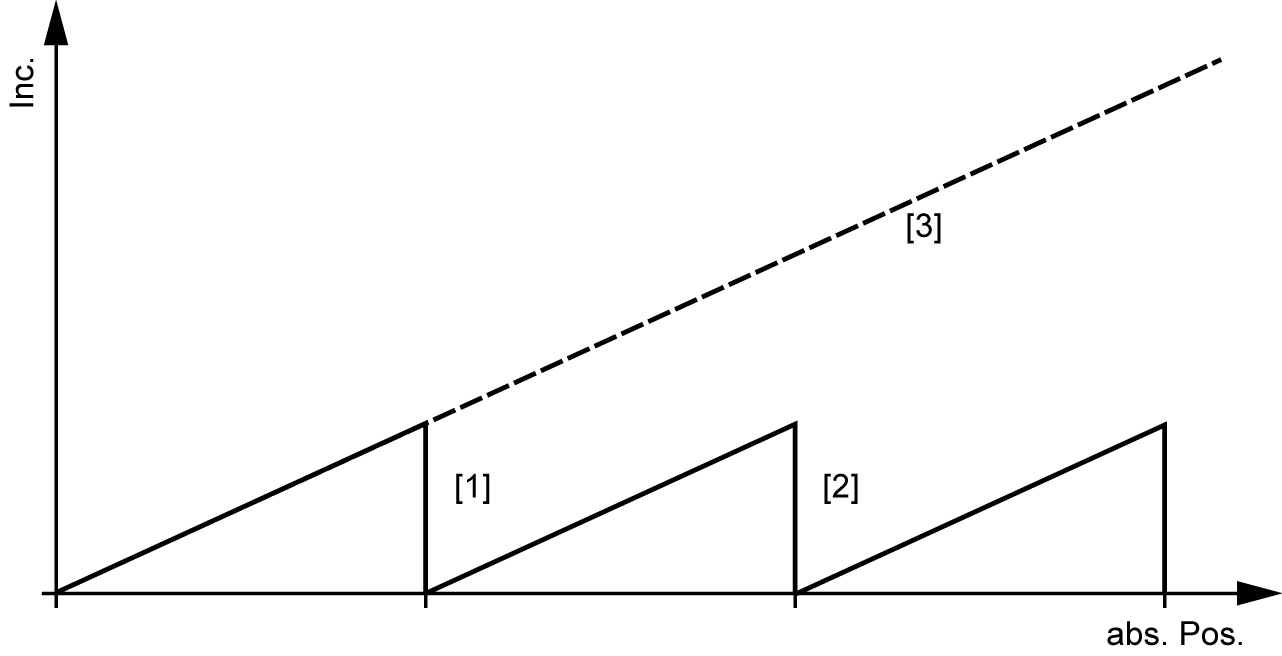
[1] 1. Geberüberlauf |
[2] 2. Geberüberlauf |
[3] vom Anwender gesehene, absolute Position |
Die Geberüberläufe werden im Umrichter mitgezählt, wodurch die absolute Position bestimmt werden kann.
Der Anwender bekommt die eigentlichen Geberüberläufe nicht zu sehen, diese werden im Umrichter gespeichert. Somit ist der Geber mit asynchron-serieller Schnittstelle ein echter Absolutwertgeber.
