Basic principles
The use of the blocks in this library is based on the following layer model:
Vehicle layer
The master block FB_501_VKC_NODE_Master controls the vehicle.
Functions:
- Limitation of vehicle speed taking into account user-defined limits and axis limits
- Limitation of acceleration, deceleration and jerk
- Output of the vehicle odometry
- Central fault evaluation and response
Drive module layer
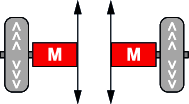
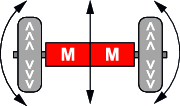
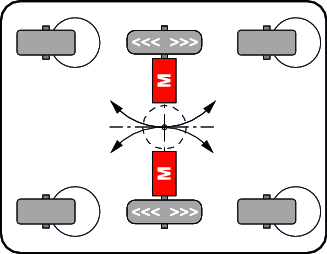
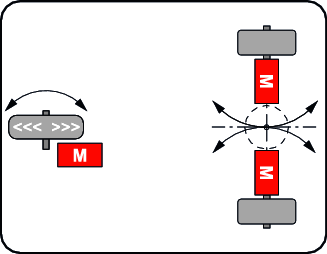
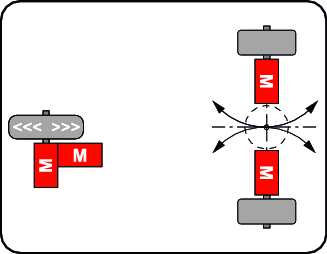
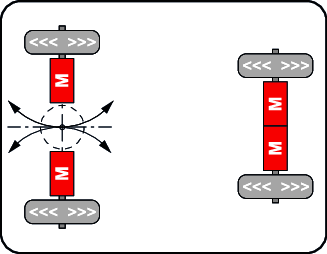
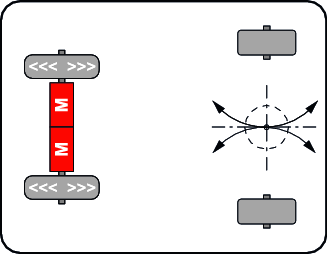
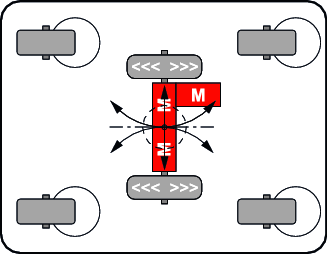
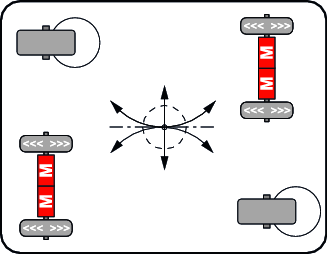
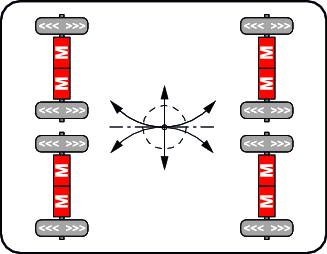
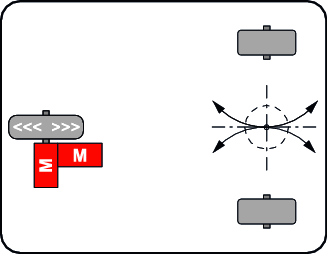
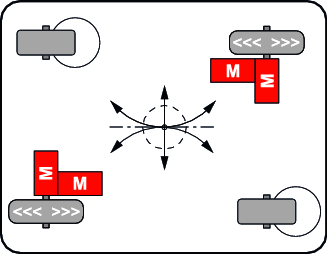
The software module supports different types of drive modules (called "nodes" in the software module). The drive modules are considered individually within this layer. One function block instance is required for each drive module. Use the appropriate function blocks for your horizontal drive.
Functions:
- Conversion of vectorial speeds into motor speeds
- Work envelope monitoring of the steering axis (if available) and fault message if necessary
- Check for realignment and possibly alignment of the steering axis (if available)
- Monitoring of maximum speeds of the drive axis
Axis layer
The axes are parameterized to the drive modules via open function blocks, which are available separately. For further information, refer to chapter Auxiliary blocks from the "Vehicle Kinematic Control Supplements" library.

Additional information