Antriebsmodule
Das Softwaremodul unterstützt 4 verschiedene Typen von Antriebsmodulen. Diese Antriebsmodule haben unterschiedliche Vor- und Nachteile und können zu verschiedenen Fahrwerken kombiniert werden, um unterschiedliche Fahrwerkslösungen zu schaffen.
Die Funktionsbausteine sind in die Bibliothek "SEW MOVIKIT Custom Vehicle Kinematic Control" integriert.
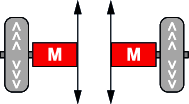
Differenzialantriebsmodul
| Ein Differenzialantriebsmodul besteht aus 2 Fahrantrieben, die für den Vorschub sorgen.
|
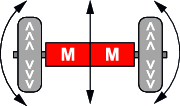
Drehschemel-Antriebsmodul
| Ein Drehschemel-Antriebsmodul besteht aus 2 Fahrantrieben, die für den Vorschub sorgen.
|
Fahr-Lenk-Antriebsmodul
| Ein Fahr-Lenk-Antriebsmodul ist besteht aus einem klassischen Antriebsrad und einer zusätzlich angetriebenen Rotationsachse, die das Antriebsrad drehen kann.
|
Lenkantriebsmodul
| Ein Lenkantriebsmodul besteht aus einer angetriebenen Rotationsachse.
|


Die Kombinationsmöglichkeiten zu verschiedenen Fahrwerken sind mathematisch nicht begrenzt. Sie können die Antriebsmodule frei kombinieren und in beliebiger Anzahl verwenden. Einzig die mechanischen Eigenschaften entscheiden über die Sinnhaftigkeit einer Kombination.
