Trägheitseigenschaften
Für alle Armglieder des gewählten Kinematikmodells müssen folgende Trägheitseigenschaften definiert werden.
HINWEIS
Beim TRIPOD_RRR_M10/TRIPOD_RRRR_M10/TRIPOD_RRRRR_M10 müssen alle drei Oberarme und alle sechs Unterarme die jeweils identischen Massen, Schwerpunkte und Trägheiten aufweisen. Die Schaltfläche "Armeigenschaften kopieren" erleichtert dabei die korrekte Parametrierung.
Parameterbezeichnung | Beschreibung |
|---|---|
Masse | Masse des jeweiligen Armgliedes. |
Schwerpunkt (X, Y, Z) | Schwerpunkt des jeweiligen Armgliedes. X, Y und Z beziehen sich auf das LCS (Link Coordinate System) des Armgliedes. |
Trägheit (XX, YY, ZZ, XY, XZ, ZX) | Trägheitsmatrix um den Schwerpunkt. X, Y und Z beziehen sich auf das LCS (Link Coordinate System) des jeweiligen Armgliedes. |
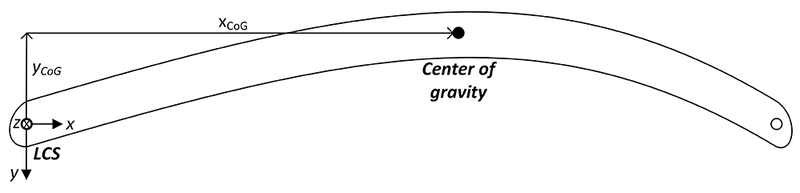
Der Ursprung des LCS (Link Coordinate System) jedes Armgliedes liegt am Anfang des Armglieds im Gelenk (siehe Abbildung). Die z-Achse zeigt in positive Achs-Richtung (entlang der Abtriebswelle des Antriebs). Die x-Achse zeigt in der Regel zum nächsten Gelenk, also zum nachfolgenden LCS.
Die LCS aller Kinematikmodelle sind im Kapitel Funktionsbeschreibung beim jeweiligen Kinematikmodell dargestellt und können in der 3D-Simulation eingeblendet werden. Grundsätzlich und insbesondere wenn die kartesische Zuordnung ungleich 0 ist, wird empfohlen, sich an den LCS in der 3D-Simulation des RobotMonitors zu orientieren (3D-Simulation > Control Panel > Coordinate Systems > Links).
Bei Kinematikmodellen vom Typ ROLLER_GANTRY_RR_M10 werden zusätzlich im Konfigurationsmenü "Trägheitseigenschaften" mit folgende Parameter angezeigt.
Parameterbezeichnung | Beschreibung |
|---|---|
Riemenräder: Trägheit | Trägheitsmoment aller Riemenräder zusammen |
Riemen: Trägheit | Trägheitsmoment des Riemens Kann berechnet werden aus |
1. Kartesisches Glied: Masse | Masse des ersten kartesischen Gelenkes, das nur in eine Richtung bewegt werden kann:
|
2. Kartesisches Glied: Masse | Masse des zweiten kartesischen Gelenkes, das in zwei Richtungen bewegt werden kann:
|
