Safety subfunctions
The following drive-related safety functions can be used:
- STO (Safe Torque Off in accordance with IEC 61800-5-2) by disconnecting the STO input.
- If the STO function is activated, the frequency inverter no longer supplies power to the motor for generating torque. This safety subfunction corresponds to a non-controlled stop according to EN 60204‑1, stop category 0.
- The STO input must be disabled by a suitable external safety controller/safety relay.
- The following figure shows the STO function:
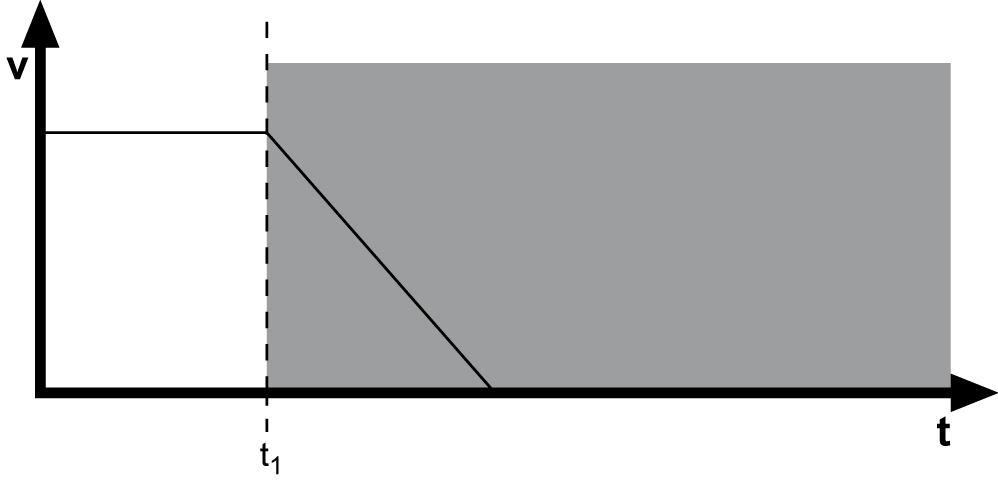
v | = | Speed |
t | = | Time |
t1 | = | Time at which STO is triggered |
| = | Disconnection range |
- SS1-t (SS1(c)) (Safe stop 1 with time control according to IEC 61800-5-2) by means of suitable external control (e.g. safety relay with delayed disconnection).
- The following procedure must followed:
- Decelerate the drive via the setpoint input using a suitable braking ramp.
- Disconnect the STO input (thereby triggering the STO function) after a specified safety-related time delay.
- This safety subfunction corresponds to a controlled stop according to EN 60204‑1, stop category 1.
- The following figure illustrates the SS1-t function:
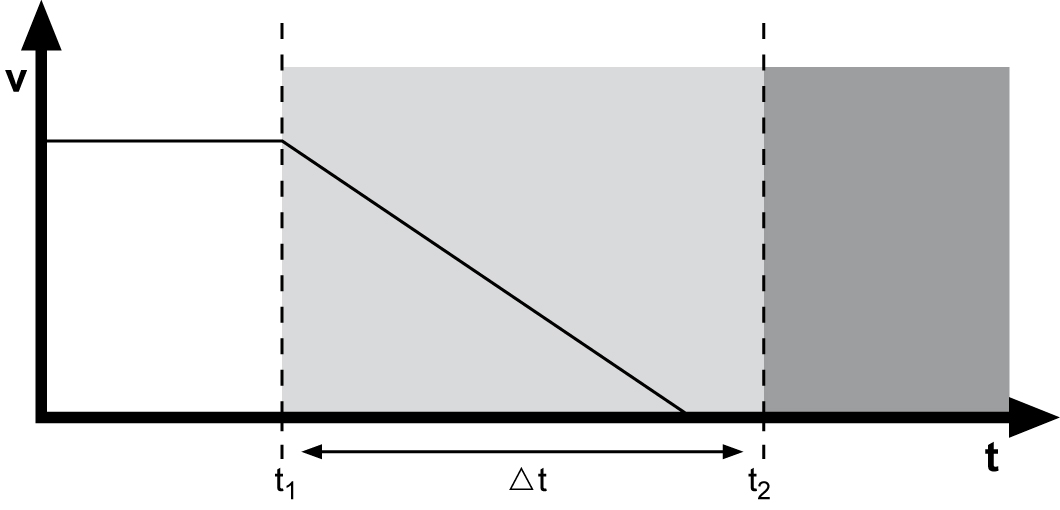
v | = | Speed |
t | = | Time |
t1 | = | Time at which the braking ramp is initiated |
t2 | = | Time at which STO is triggered |
Δt | = | Delay time until STO is triggered |
| = | Range of safe time delay |
| = | Disconnection range |
