Kinematikbibliothek zur Steuerung fahrerloser Transportfahrzeuge
MOVIKIT® Custom 0005 Vehicle Kinematic Control
| Das Softwaremodul dient zur Umsetzung von vektorbasierten Geschwindigkeiten aus einer Navigationssteuerung, einem Spurführsensor oder einer Fernbedienung in Radgeschwindigkeiten. Dabei werden mechanische und projektspezifische Bedingungen der Fahrzeuge berücksichtigt. |
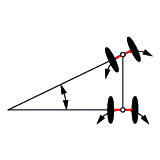
Unterschieden wird zwischen bidirektionalem und omnidirektionalem Fahren:
bidirektionales Fahren | omnidirektionales Fahren |
|---|---|
|
|
Fahrwerk
| Fahrwerk
|
Fahrmanöver
| Fahrmanöver
|


Das Softwaremodul unterstützt verschiedene Antriebssysteme. Für jedes Antriebssystem muss der passende Funktionsbaustein aus der Bibliothek verwendet werden. Die Anzahl der Drehpunkte, an denen das Antriebssystem Verwendung findet, bestimmt die Anzahl der Instanzen des Funktionsbausteins.
Die Lizenz gilt jeweils für eine Instanz. Benötigt wird die Anzahl an Lizenzen, die der Anzahl an Drehpunkten im Fahrzeug entspricht.
Funktionen
- Umrechnung von vektoriellen Geschwindigkeiten in Motordrehzahl
- Berechnung aus den Sollwerten für Fahrgeschwindigkeit, Fahrtrichtung und Drehgeschwindigkeit des Fahrzeugs in die Sollgeschwindigkeit (Drehzahl) der einzelnen Fahrmotoren
- Fahrzeuge mit unterschiedlichen Antriebssystemen können über eine einheitliche Schnittstelle bewegt werden.
- Begrenzung von Geschwindigkeiten
- Begrenzung der Fahrzeuggeschwindigkeit unter Berücksichtigung von Userlimits und der Limits aus der Achskonfiguration der beteiligten Achsen
- Begrenzung von Beschleunigung/Verzögerung und des Rucks
- Begrenzung der Fahrzeugbeschleunigung und des Rucks unter Berücksichtigung von Userlimits und der Limits aus der Achskonfiguration der beteiligten Achsen
- Prüfung des Arbeitsbereichs der Lenkachse (falls vorhanden)
- Der zulässige Arbeitsbereich wird zur Laufzeit kontinuierlich überwacht.
- Prüfung auf Neuausrichtung und ggf. Ausrichtung der Lenkachse (falls vorhanden)
- Die zulässige Soll-Ist-Abweichung der Lenkachse wird überwacht und ggf. eine Neuausrichtung eingeleitet.
- Ausgabe der Fahrzeugodometrie
Weitere Informationen: Handbuch "MOVIKIT® Custom 0005 Vehicle Kinematic Control"
