Principe de fonctionnement
L'illustration suivante montre un exemple typique de positionnement à grande / petite vitesse.
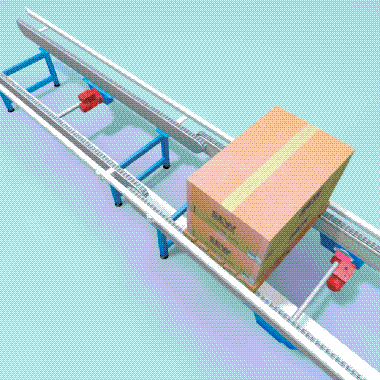
Sur le convoyeur à chaînes ci-dessus, des trajets longs sont divisés en plusieurs segments.
La gestion décentralisée du positionnement permet d'alléger les tâches de la commande centrale. Le positionnement s'effectue ainsi indépendamment des temps de bus et permet une grande précision de positionnement et le passage rapide du matériau d'un segment à l'autre.

[1] | Capteur "Arrêt gauche" / Contrôle gabarit droit | [A] | Déplacement rapide |
[2] | Capteur "GV/PVGV/PV = grande vitesse / petite vitesse | [B] | Déplacement lent |
[3] | Capteur "GV/PV1) droite" | ||
[4] | Capteur "Arrêt droite" / Contrôle gabarit gauche |
