Touchprobe POSITIONING
Ein Touchprobe-POSITIONING besteht aus 3 Teilen:
- Im REG-Teil wird der Touchprobe-Befehl parametriert. Hier wird unter anderem die Quelle (Touchprobe soll auf Flanke eines Inverter-Touchprobe oder einer BOOL-Variable ausgelöst werden), der Modus und die Messrichtung angegeben. HINWEIS: Bei Verwendung des Inverter-Touchprobes ist es notwendig, dass der Sensor mit allen realen Achsen unterhalb des Roboters (außer Achsen eines MultiAxisControllers) verbunden wird. Weitere Informationen zum Parametrieren des Touchprobe-Befehls finden Sie in Kapitel Touchprobe.
- Im POSITIONING-Teil wird die Distanz (in Messrichtung) angegeben, welche nachdem Auslösen des Touchprobe-Sensors oder der triggernden BOOL-Variable zurückgelegt werden soll. Die angegebene Distanz muss immer größer 0 sein, um den Roboter rechtzeitig anhalten zu können. Ist der Restweg zu klein gewählt oder der Roboter so schnell unterwegs, dass ein rechtzeitiges Anhalten nicht einmal mit Nothalt-Parametern möglich ist, geht der Roboter in den Fehlerzustand.
- Mit dem CONTINUE-Teil wird angegeben, bis zu welcher Stelle Touchprobe aktiv sein soll oder welche Segmente zum POSITIONING-Weg gehören. Der MotionPointer "M" gibt an, welcher Befehl gerade ausgeführt wird. Erreicht der MotionPointer "M" den CONTINUE-Befehl, ohne das ein Touchprobe-Event ausgelöst wurde, wird Touchprobe wieder deaktiviert. Ein Auslösen ist dann nicht mehr möglich. Wird ein Touchprobe-Event vor Erreichen des CONTINUE-Befehls ausgelöst, wird das Programm nach ausführen der Restwegpositionierung ab der CONTINUE-Stelle fortgeführt. Der ProgramPointer "P" gibt an, bis zu welcher Stelle ein Programm bereits interpretiert ist. HINWEIS: Bei Auslösen des Touchprobe-Events muss der ProgramPointer "P" das Programm bereits mindestens bis zum CONTINUE-Befehl interpretiert haben.
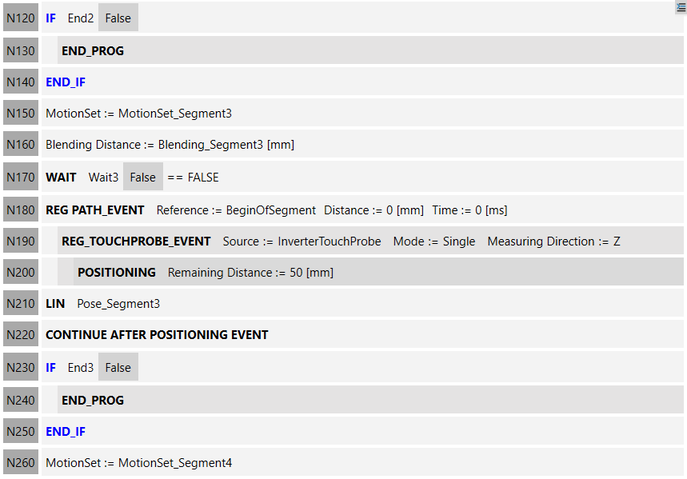
Folgendes Anwendungsbeispiel zeigt die Verwendung eines Touchprobe-POSITIONING, das aktiv seien soll, während die Bewegung zu "LIN Pose_Segment3" ausgeführt wird.
- Der Touchprobe wird aktiviert, sobald der ProgramPointer "P" den REG-Befehl interpretiert. Um sicherzustellen, dass das nicht zu früh passiert, wird im Beispiel ein PathEvent verwendet.
- In Zeile 180 wird das PathEvent eingefügt, das am Beginn der Bewegung zu "LIN Pose_Segment3" ausgelöst wird und als Aktion (Zeile 190 + 200) den Touchprobe aktiviert.
- Anschließend wird in Zeile 190 + 200 der Touchprobe so parametriert, dass eine Flanke des Inverter-Touchprobes eine Restwegpositionierung auslöst. Die Restwegstrecke wird auf 50 mm gestellt.
- Touchprobe-POSITIONING soll nach Erreichen des Position "POSE_Segment3" wieder deaktiviert werden bzw. das Programm soll nach durchführen der Restwegpositionierung hier fortgeführt werden. Deshalb wird der CONTINUE-Befehl in Zeile 220 eingefügt.