Referencing to an absolute position of the encoder
In this chapter, the possible constellations for the "Absolute position of encoder" reference travel type are explained in greater detail when referencing the "MAC1" (see the following graphic). During the process, the following project setup is assumed:
|
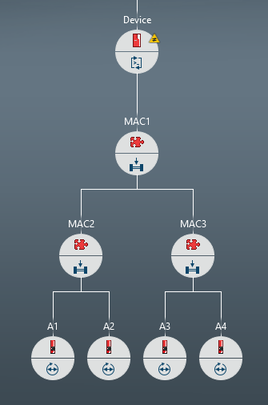
The following constellations are possible:
An external encoder is connected to each inverter
If an external encoder ("A1"+"A2"+"A3"+"A4") is connected to each inverter, the actual position of the motor encoder is set to the actual position of the external encoder of the respective inverter.
"MAC2" has a distance encoder and "MAC3" has an external encoder
If "MAC2" and "MAC3" each have an external encoder, the motor encoder of inverter "A1" and "A2" are set to the actual position of the external encoder of "MAC2". On the other hand, set the motor encoder of inverter "A3" and "A4" to the actual position of the external encoder of "MAC3".
Only one external encoder is available
If only one external encoder is available in the complete axis group of "MAC1", the motor encoders of inverters "A1", "A2", "A3", and "A4" are set to the actual position of the external encoder.
No external encoder available
If no external encoder is available in the complete axis group of "MAC1", an error is set since referencing is not possible.
