Overload protection
The following application example for the software module illustrates the "Overload protection" function integrated into "Skew priority" operating mode. The example below uses a hoist to show how the group members behave when a drive is overloaded.
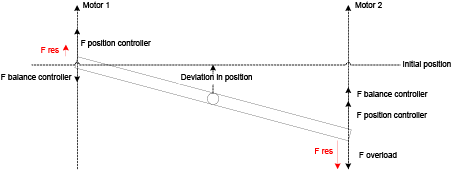
- Without overload protection
- When a drive on a hoist is overloaded, the affected side begins to lower, resulting in a deviation in position within the axis group. The position controller then tries to compensate for this deviation in position by specifying a correcting value for the axis group, which applies to both drives. The balance controller recognizes that the drives are in a different position to each other and tries to compensate for this. The correcting value of the balance controller thus counteracts the correcting value of the position controller for drive 1. Depending on the configuration of the individual controllers, this may worsen the tilt or misalignment of the hoist. For drive 2, the balance controller and the position controller both act in the same direction. However, since drive 2 has reached its torque limit, it can no longer generate the required torque.

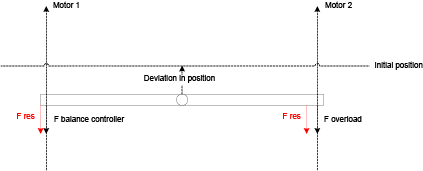
- With overload protection
- The software module detects that group member 2 has reached its maximum torque and therefore eliminates the correcting value specified by the position controller. Drive 1 then continues to react to the misalignment of the application and moves downwards synchronously with drive 2.
Additional information



