Teilnehmer synchronisieren sich in der Bewegung
- Setzen Sie die Variable lrMACPriority_Torque_Skew der SuperAxisGroup auf den Wert "2", um die Betriebsart "Priorität Schrägstellung - ohne Überlastschutz" zu aktivieren und referenzieren Sie alle Teilnehmer.
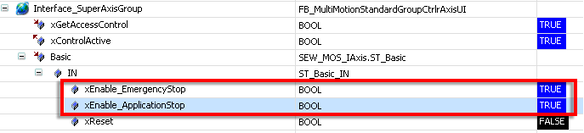
- Setzen Sie die Variablen xEnable_EmergencyStop und xEnable_ApplicationStop in der Struktur Basic.IN der SuperAxisGroup auf "TRUE".
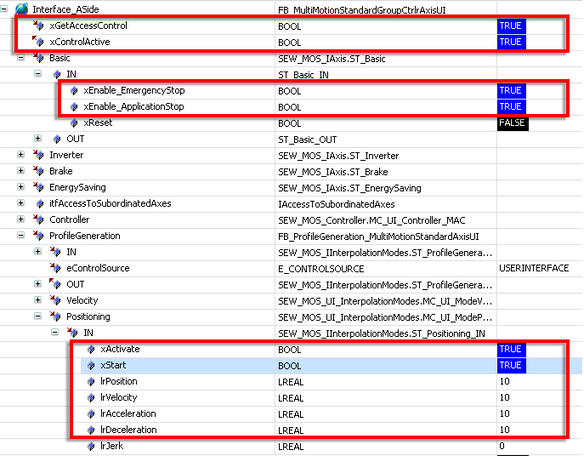
- Setzen Sie die Variable xGetAccessControl der ASide auf "TRUE", um den Zugriff auf die Anwenderschnittstelle der Achsgruppe anzufordern.
- Setzen Sie die Variablen xEnable_EmergencyStop und xEnable_ApplicationStop in der Struktur Basic.IN der ASide auf "TRUE", um die Achsgruppe freizugeben.
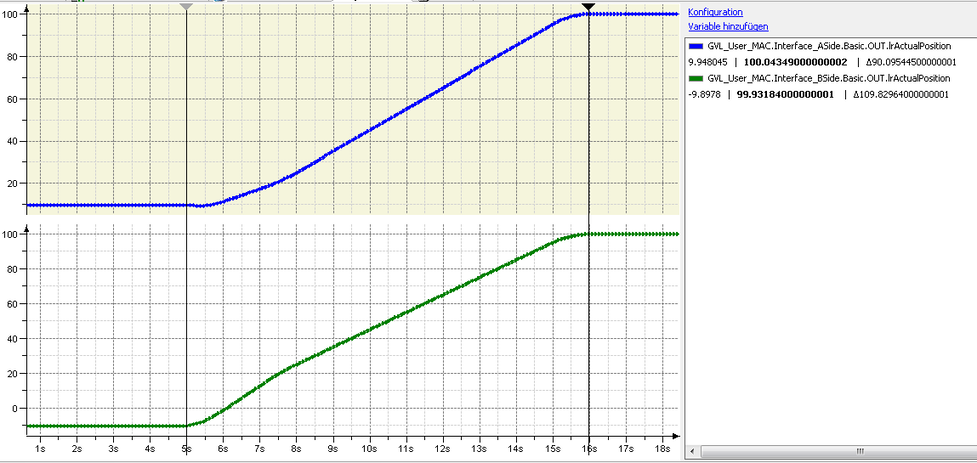
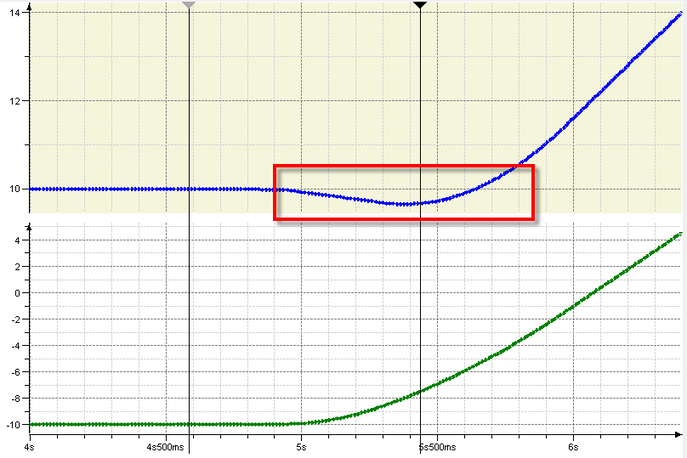
- Geben Sie als Zielposition lrPosition in der Struktur ProfileGeneration.Positioning.IN der ASide den Wert "10" an.
- Setzen Sie die Variable xGetAccessControl der ASide auf "FALSE", um den Zugriff auf die Achsgruppe zu beenden.
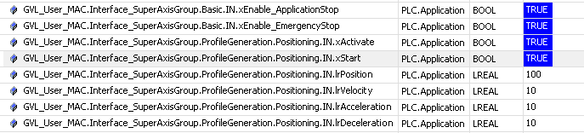
- Setzen Sie die Variablen xEnable_EmergencyStop und xEnable_ApplicationStop in der Struktur Basic.IN der SuperAxisGroup auf "TRUE", um die Achsgruppe freizugeben. Legen Sie in der Struktur ProfileGeneration.Positioning.IN der SuperAxisGroup zudem direkt folgende Parameter fest: