Teilnehmer zuerst synchronisieren
- Setzen Sie die Variable MAC.Config.ePriority der SuperAxisGroup auf den Wert "SkewLevelingWithoutOverloadGuard", um die Betriebsart "Priorität Schrägstellung - ohne Überlastschutz" zu aktivieren und referenzieren Sie alle Teilnehmer.
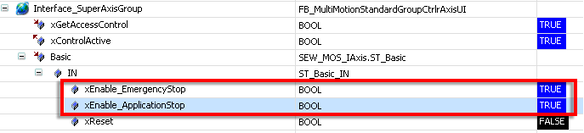
- Setzen Sie die Variablen xEnable_EmergencyStop und xEnable_ApplicationStop in der Struktur Basic.IN der SuperAxisGroup auf "TRUE".
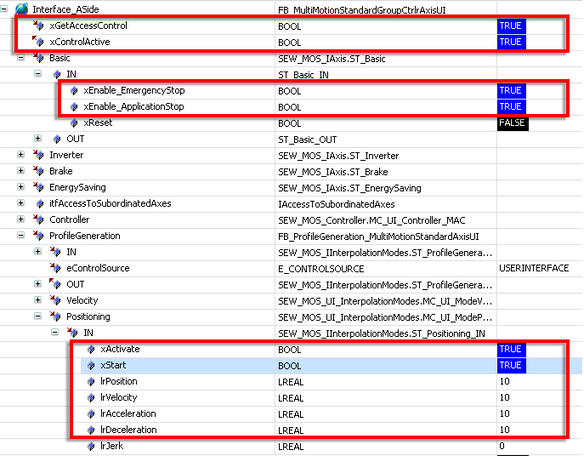
- Setzen Sie die Variable xGetAccessControl der ASide auf "TRUE", um den Zugriff auf die Anwenderschnittstelle des Achsgruppenteilnehmers anzufordern.
- War die Anfrage erfolgreich, gibt die Variable xControlActive den Wert "TRUE" aus.
- Setzen Sie die Variablen xEnable_EmergencyStop und xEnable_ApplicationStop in der Struktur Basic.IN der ASide auf "TRUE", um den Achsgruppenteilnehmer freizugeben.
- Geben Sie als Zielposition lrPosition in der Struktur ProfileGeneration.Positioning.IN der ASide 10 an.
- Geben Sie für das Verfahren des Achsgruppenteilnehmers für lrVelocity, lrAcceleration und lrDeceleration in der Struktur ProfileGeneration.Positioning.IN der ASide 10 an.
- Setzen Sie die Variablen xActivate und xStart auf "TRUE", um eine Bewegung auszuführen.
- Setzen Sie die Variable xGetAccessControl der ASide auf "FALSE", um den Zugriff auf die Achsgruppe zu beenden.
- Setzen Sie die Variablen xEnable_EmergencyStop und xEnable_ApplicationStop in der Struktur Basic.IN der SuperAxisGroup auf "TRUE", um die Achsgruppe freizugeben.
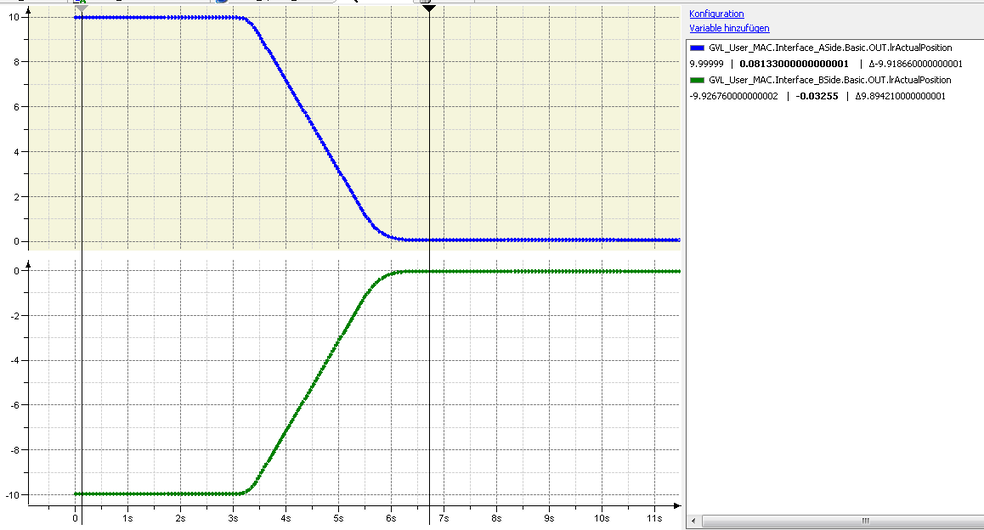
- Die beiden Teilnehmer bewegen sich entgegengesetzt aufeinander zu, bis beide die Position 0 erreicht haben.
- Die beiden Teilnehmer verfahren als Verbund zur angegebenen Zielposition.