Speed and acceleration
Setpoint generation consistently attempts to calculate the speed setpoint and the acceleration setpoint in addition to the position setpoint.
This is also possible without restrictions for the following time-based operating modes:
- Speed control (Velocity)
- Absolute positioning (Positioning)
- Relative positioning (PositioningRelative)
- Jog mode (Jog)
- Referencing (Homing)
In master-based operating modes, it is only possible if the master source provides speed and acceleration information in addition to the position information. This affects the following functions:
- Direct coupling (Tracking)
- Synchronous operation (Gearing)
- Electronic cam (Camming)
If a real or a virtual axis that uses only time-based operating modes is used as the master source, then these are available without restrictions.
However, if an external encoder is used as the master source, for example, only position information is initially available. If the external encoder is routed via the MOVIKIT® EncoderInterface, then speed and acceleration information can also be calculated via the MOVIKIT® EncoderInterface and in this way also provided by the master source.
If an application ensures that the speed and acceleration setpoint is calculated in addition to the position setpoint, then the inverter can process these calculated values as precontrol values in the "Interpolated position control" operating mode (FCB 10) and no longer has to determine them by differentiating the position setpoint.
The corresponding variables are already connected in the process data:
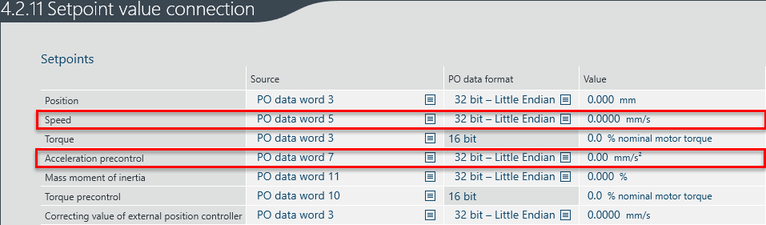
The processing of these variables as precontrol values is activated by activating the parameter "Precontrol values via setpoint connection":
|

INFORMATION