Geschwindigkeit und Beschleunigung
Die Sollwert-Generierung versucht durchgängig, neben dem Positions-Sollwert auch den Geschwindigkeits-Sollwert und den Beschleunigungs-Sollwert zu berechnen.
Bei folgenden zeitbasierten Betriebsarten ist dies auch uneingeschränkt möglich:
- Geschwindigkeitsvorgabe (Velocity)
- Absolute Positionierung (Positioning)
- Relative Positionierung (PositioningRelative)
- Tippen (Jog)
- Referenzierung (Homing)
Bei den masterbasierten Betriebsarten ist es nur dann möglich, wenn die Master-Quelle ihrerseits außer der Positions-Information auch Geschwindigkeits- und Beschleunigungs-Informationen zur Verfügung stellt. Das betrifft folgende Funktionen:
- Direkte Kopplung (Tracking)
- Synchronlauf (Gearing)
- Kurvenscheibe (Camming)
Wird als Master-Quelle eine reale oder virtuelle Achse verwendet, die nur zeitbasierte Betriebsarten nutzt, stehen diese uneingeschränkt zur Verfügung.
Wird jedoch als Master-Quelle z. B. ein externer Geber verwendet, steht zunächst nur eine Positions-Information zur Verfügung. Wird der externe Geber über das MOVIKIT® EncoderInterface geführt, lassen sich über das MOVIKIT® EncoderInterface auch Geschwindigkeits- und Beschleunigungs-Informationen berechnen und somit auch von der Masterquelle zur Verfügung stellen.
Wenn in einer Anwendung sichergestellt ist, dass neben dem Positions- auch der Geschwindigkeits- und Beschleunigungs-Sollwert berechnet wird, dann kann der Umrichter in der Betriebsart "Interpolierte Positionsregelung" (FCB 10) diese berechneten Werte als Vorsteuerwerte verarbeiten und muss diese nicht mehr durch Differenzierung des Positions-Sollwerts bilden.
Die entsprechenden Größen sind bereits in den Prozessdaten verschaltet:
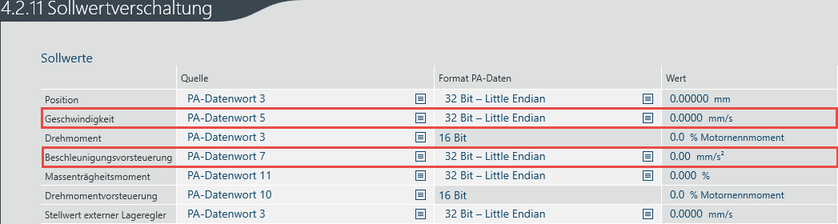
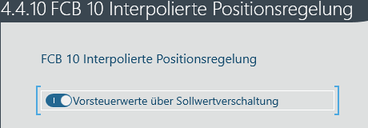
Die Verarbeitung dieser Größen als Vorsteuerwerte wird aktiviert, indem der Parameter "Vorsteuerwerte über Sollwertverschaltung" eingeschaltet wird:
|
HINWEIS