Linear axes
Control the axis in the Gearing.Config.Start structure as follows:
Interface in the IEC Editor

Procedure
- While the master axis is moving, the xStart start signal is set in the "Gearing" mode of the slave axis.
- With the configuration eTransitionType = "TIMEBASED" and eStartMode = "WITH_CW_CCW_REFERENCE_POSITION", the eGearingState state switches directly from "STOPPED" (0) to "GEAR_IN" (2).
- After the configured synchronization time lrGearInTime has passed, the eGearingState state switches from "GEAR_IN" (2) to "ACTIVE" (3). The slave axis is synchronized so that is reaches its start position at the configured reference position lrGearInReferencePosition (position of the cursor).
Trace recording
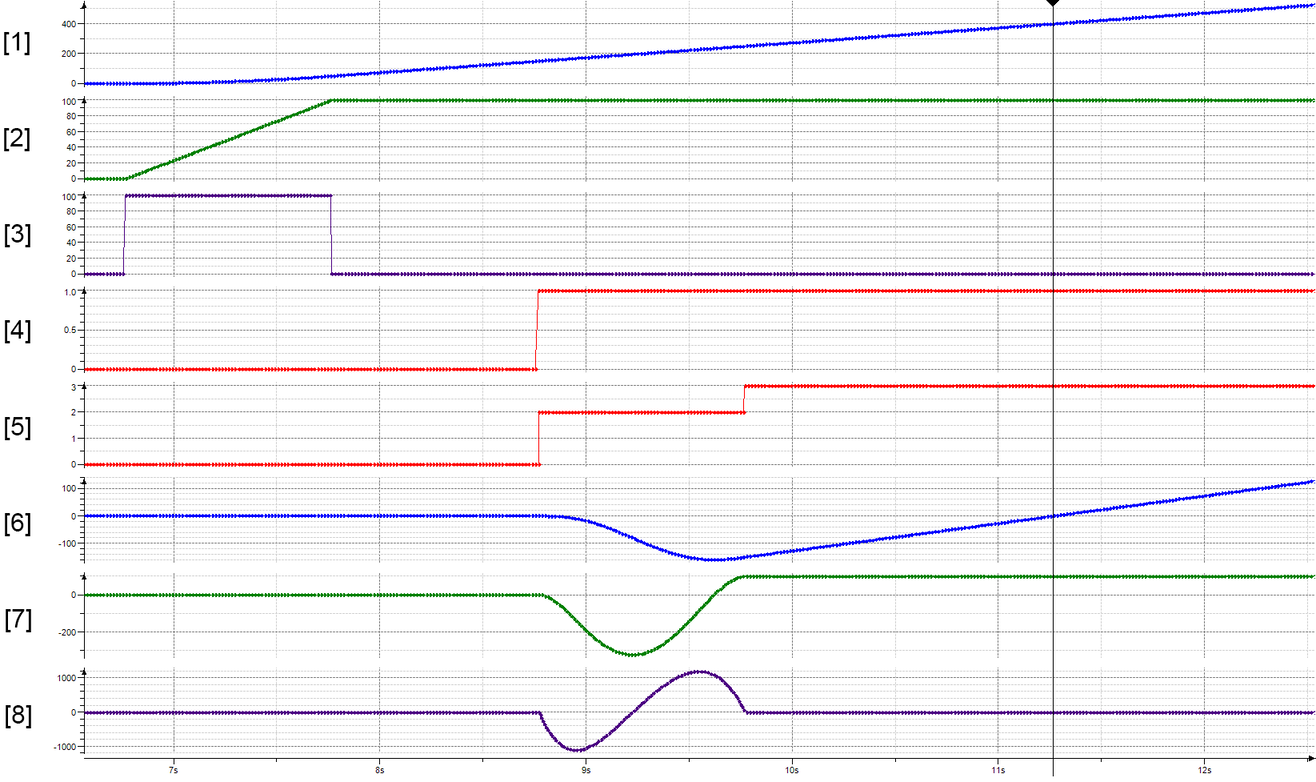
[1] | Position of the master axis |
[2] | Speed of the master axis |
[3] | Acceleration of the master axis |
[4] | xStart start signal of the Gearing mode |
[5] | eGearingState state of the Gearing mode |
[6] | Position of the slave axis |
[7] | Speed of the slave axis |
[8] | Acceleration of the slave axis |
The fact that a time-based transition is also performed when the master axis is not moving can be used as a replacement for an alignment motion, as shown in the following trace recording.
At the beginning of the sequence, the master axis is at the position "200.0"; the position of the slave axis is "0.0".
Procedure
- While the master axis is not moving, the xStart start signal is given in the "Gearing" mode of the slave axis.
- The reference position is set to lrGearInReferencePosition = "0.0"; the transition is configured to eTransitionType = "TIMEBASED".
- While the master axis is still stationary, the eGearingState state switches from "STOPPED" (0) to "GEAR_IN" (2) and the slave axis transitions to the position of the master axis ("200.0").
- At the end of the configured synchronization time lrGearInTime, the slave axis becomes synchronous. The eGearingState state switches from "GEAR_IN" (2) to "ACTIVE" (3). When the master axis begins moving, the slave axis moves immediately with the identical position.
Trace recording
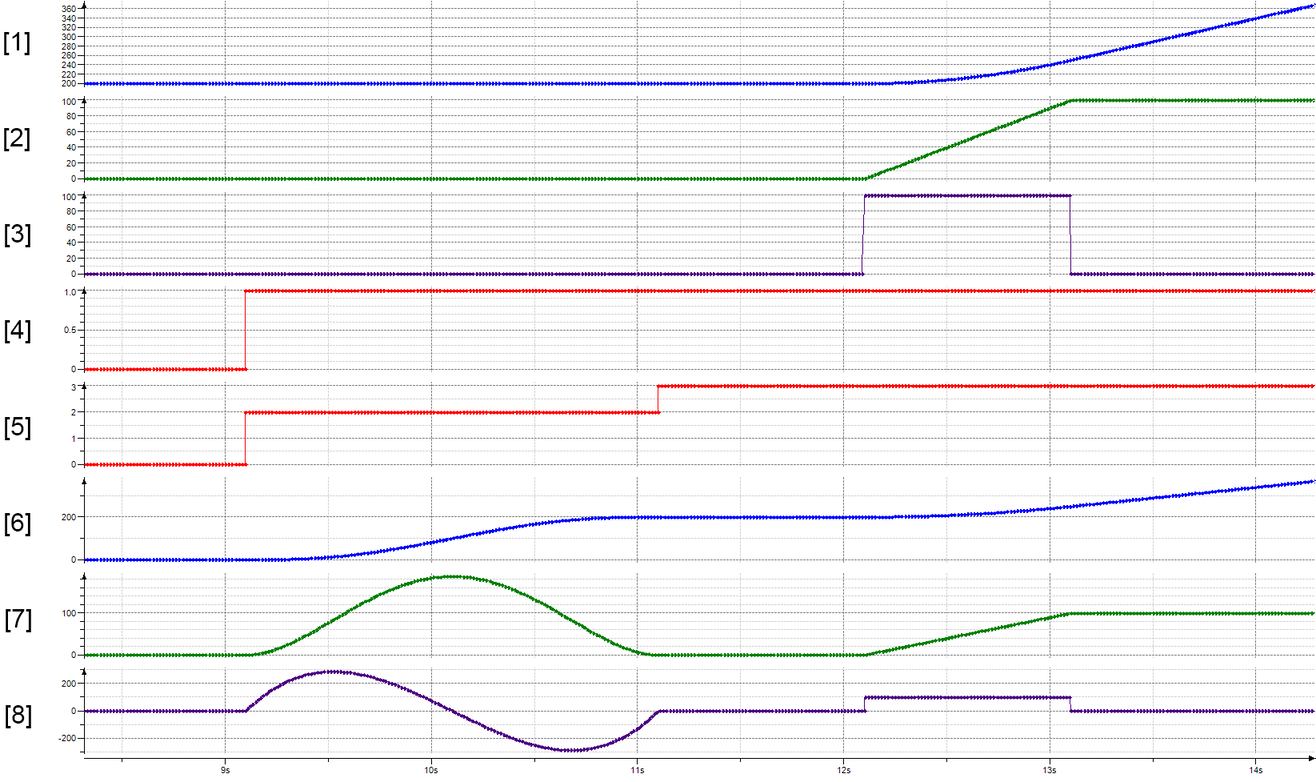
[1] | Position of the master axis |
[2] | Speed of the master axis |
[3] | Acceleration of the master axis |
[4] | xStart start signal of the Gearing mode |
[5] | eGearingState state of the Gearing mode |
[6] | Position of the slave axis |
[7] | Speed of the slave axis |
[8] | Acceleration of the slave axis |
