Linear-Achsen
Steuern Sie die Achse in der Struktur Gearing.Config.Start folgendermaßen an:
Schnittstelle im IEC-Editor

Ablauf
- Während die Master-Achse sich bewegt, wird das Start-Signal xStart im Mode "Gearing" der Slave-Achse gesetzt.
- Mit der Konfiguration eTransitionType = "TIMEBASED" und eStartMode = "WITH_CW_CCW_REFERENCE_POSITION" wechselt der Zustand eGearingState direkt von "STOPPED" (0) nach "GEAR_IN" (2).
- Nach Verstreichen der konfigurierten Einkuppelzeit lrGearInTime wechselt der Zustand eGearingState von "GEAR_IN" (2) nach "ACTIVE" (3). Die Slave-Achse wird so aufsynchronisiert, dass sie an der konfigurierten Referenzposition lrGearInReferencePosition ihre Start-Position erreicht (Position des Cursors).
Trace-Aufzeichnung
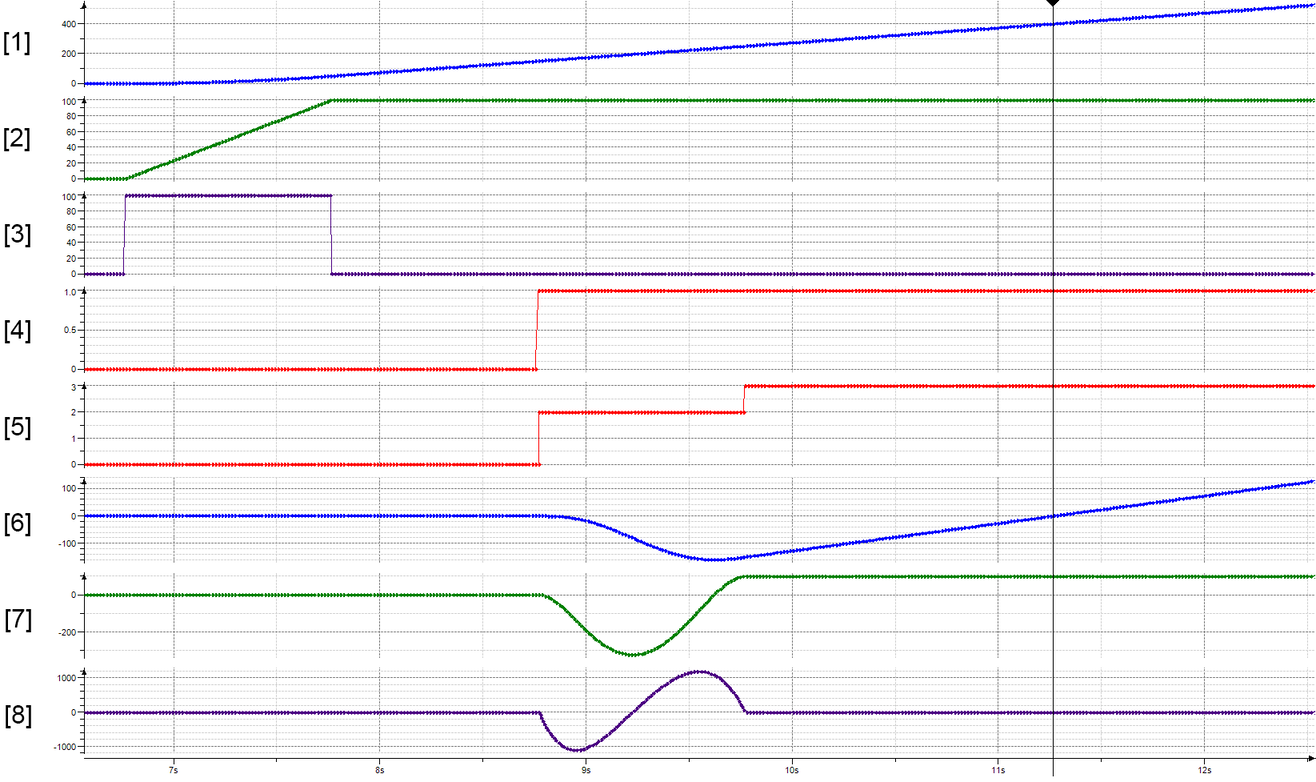
[1] | Position der Master-Achse |
[2] | Geschwindigkeit der Master-Achse |
[3] | Beschleunigung der Master-Achse |
[4] | Start-Signal xStart des Mode Gearing |
[5] | Zustand eGearingState des Mode Gearing |
[6] | Position der Slave-Achse |
[7] | Geschwindigkeit der Slave-Achse |
[8] | Beschleunigung der Slave-Achse |
Die Tatsache, dass eine zeitbasierte Transition auch bei stehender Master-Achse ausgeführt wird, kann als Ersatz für eine Ausricht-Bewegung genutzt werden, wie nachfolgende Trace-Aufzeichnung zeigt.
Zu Beginn der Sequenz steht die Master-Achse an der Position "200.0", die Position der Slave-Achse ist "0.0".
Ablauf
- Bei stehender Master-Achse wird das Start-Signal xStart am Mode "Gearing" der Slave-Achse gegeben.
- Die Referenzposition ist eingestellt auf lrGearInReferencePosition = "0.0", die Transition ist auf eTransitionType = "TIMEBASED" konfiguriert.
- Noch während die Master-Achse steht, wechselt der Zustand eGearingState von "STOPPED" (0) auf "GEAR_IN" (2) und die Slave-Achse führt eine Transition zur Position der Master-Achse ("200.0") aus.
- Am Ende der konfigurierten Einkuppelzeit lrGearInTime wird die Slave-Achse synchron. Der Zustand eGearingState wechselt von "GEAR_IN" (2) auf "ACTIVE" (3). Die Slave-Achse bewegt sich beim Losfahren der Master-Achse sofort mit identischer Position mit.
Trace-Aufzeichnung
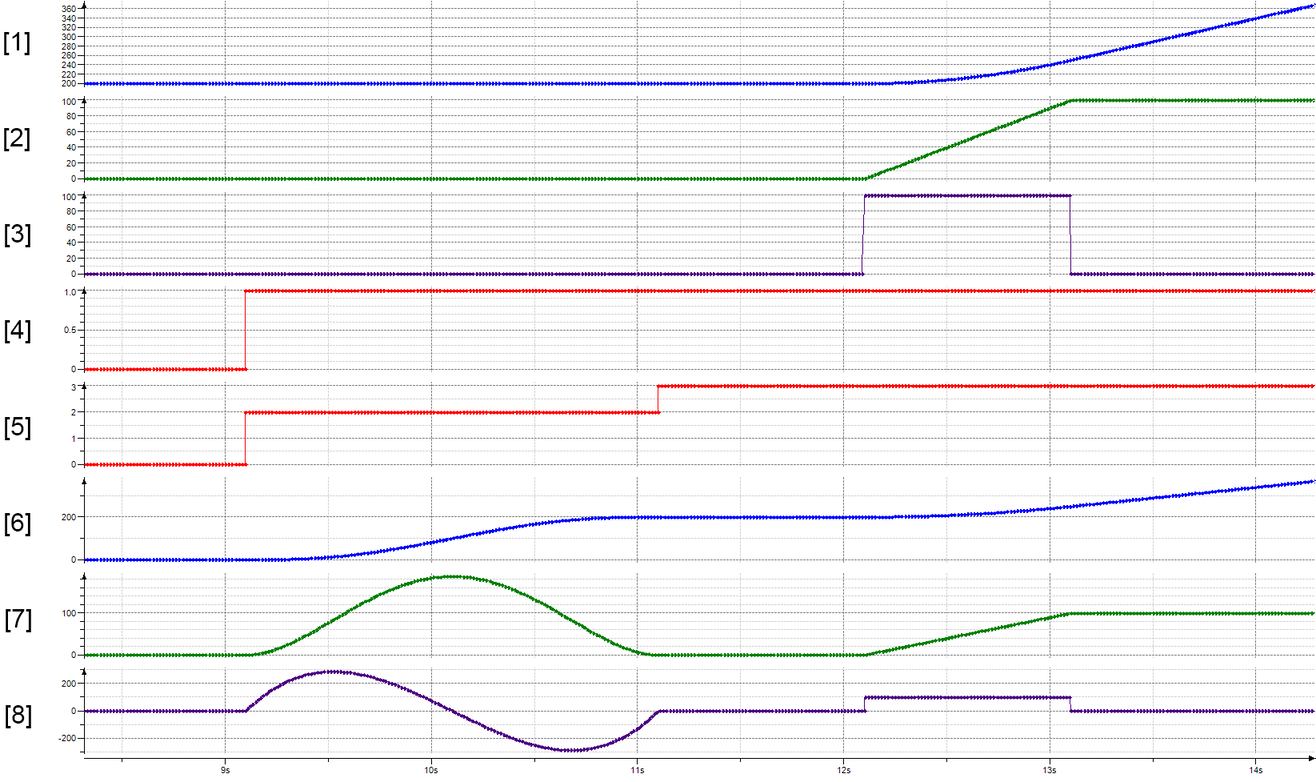
[1] | Position der Master-Achse |
[2] | Geschwindigkeit der Master-Achse |
[3] | Beschleunigung der Master-Achse |
[4] | Start-Signal xStart des Mode Gearing |
[5] | Zustand eGearingState des Mode Gearing |
[6] | Position der Slave-Achse |
[7] | Geschwindigkeit der Slave-Achse |
[8] | Beschleunigung der Slave-Achse |
