Referencing with homing
The following application example illustrates how you can configure referencing with homing.
Control
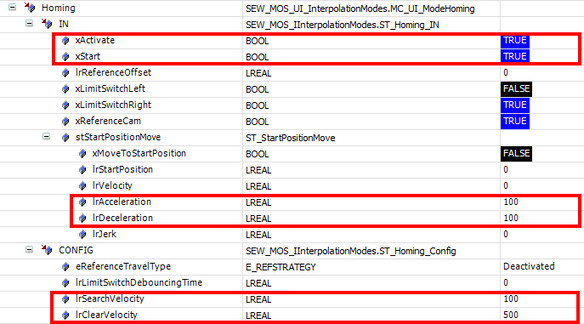
Control the axis in the Homing structure as follows:
- To activate the operating mode, set xActivate to "TRUE".
- Define the search speed lrSearchVelocity in the CONFIG structure.
- In the stStartPositionMove structure, define the acceleration lrAcceleration to which the search speed is accelerated.
- Define the retraction speed lrClearVelocity in the CONFIG structure.
- In the stStartPositionMove structure, define the deceleration lrDeceleration with which the search speed is decelerated to the retraction speed.
- To start the operating mode, set xStart to "TRUE".
Interface in the IEC Editor
Trace recording

[1] | SEW_GVL.Interface_Axis1.ProfileGeneration.Homing.In.xActivate |
[2] | SEW_GVL.Interface_Axis1.ProfileGeneration.Homing.In.xStart |
[3] | SEW_GVL.Interface_Axis1.ProfileGeneration.Homing.In.xReferenceCam |
[4] | SEW_GVL_Internal.Axis1._fbProfileGenerationControl._stOUTInterpolation.stSetpointsUserUnits.lrPosition |
[5] | SEW_GVL_Internal.Axis1._fbProfileGenerationControl._stOUTInterpolation.stSetpointsUserUnits.lrVelocity |
[6] | SEW_GVL_Internal.Axis1._fbProfileGenerationControl._stOUTInterpolation.stSetpointsUserUnits.lrAcceleration |
[7] | SEW_GVL.Interface_Axis1.ProfileGeneration. Homing.Out.xInPosition |
[8] | SEW_GVL.Interface_Axis1. Homing.PositioningRelative.Out.xDone |
Note:
The acceleration set under stStartPositionMove.lrAcceleration is used for accelerating the system to the search speed defined under CONFIG.lrSearchVelocity.
When the cam is detected at IN.xReferenceCam, the movement decelerates as specified under stStartPositionMove.lrDeceleration until retraction speed CONFIG.lrClearVelocity is reached.
The movement stops when the inverter has moved clear of the cam.
Homing then follows on from standstill.
INFORMATION