Ausrichten mit der Adjust-Funktion im StartMode "CONTINUE_SYNCHRONIZED"
Wie im Kapitel Einkuppel-Mechanismus mit Synchronpunkt erläutert, ergibt sich mit dem StartMode "CONTINUE_SYNCHRONIZED" der Aufhängepunkt der Geraden, mit welcher der Positionsbezug zwischen Master- und Slave-Achse eindeutig definiert ist, aus den intern gespeicherten Werten der letzten Master- und der letzten Slave-Position.
Der Anwender kann diese beiden internen Bezugspositionen steuern. Dazu muss die Betriebsart "Gearing" deaktiviert sein, indem die Eingangsvariable ProfileGeneration.Gearing.In.xActivate auf "FALSE" gesetzt wird.
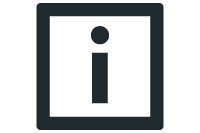
Zum Einstellen der Master-Bezugsposition wird der gewünschte Wert über die Variablen ProfileGeneration.Gearing.In.lrMasterValue eingestellt und anschließend die Variable ProfileGeneration.In.xSetMasterValue auf "TRUE" gesetzt. Wenn die Ausgangsvariable ProfileGeneration.Gearing.Out.xSetMasterValueDone den Wert "TRUE" zurückmeldet, wurde die gewünschte Master-Bezugsposition übernommen. Der eingestellte Wert wird über ProfileGeneration.Gearing.Out.lrSetpPositionMaster zurückgespiegelt.
Schnittstelle im IEC-Editor
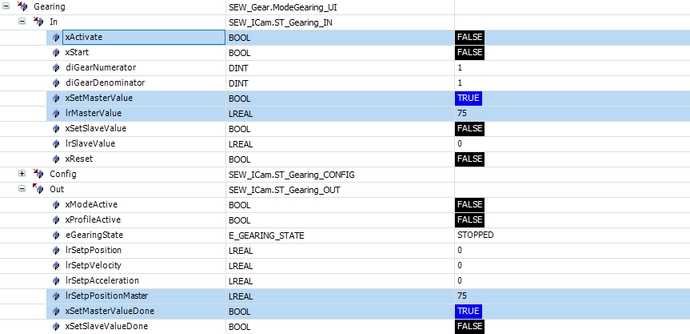
Zum Einstellen der Slave-Bezugsposition wird der gewünschte Wert über die Variablen ProfileGeneration.Gearing.In.lrSlaveValue eingestellt und anschließend die Variable ProfileGeneration.In.xSetSlaveValue auf "TRUE" gesetzt. Wenn die Ausgangsvariable ProfileGeneration.Gearing.Out.xSetSlaveValueDone den Wert "TRUE" zurückmeldet, wurde die gewünschte Slave-Bezugsposition übernommen. Der eingestellte Wert wird über ProfileGeneration.Gearing.Out.lrSetpPosition zurückgespiegelt.
Schnittstelle im IEC-Editor
Nachdem der Anwender auf diese Weise die Bezugspositionen eingestellt hat, kann die Betriebsart "Gearing" im StartMode CONTINUE_SYNCHRONIZED aktiviert werden, indem die Variable ProfileGeneration.Gearing.In.xActivate auf "TRUE" gesetzt wird.
Mit der steigenden Flanke werden folgende Aktionen durchgeführt:
- Die Differenz der aktuellen Master-Position zur eingestellten Master-Bezugsposition wird berechnet.
- Diese Differenz wird mit den über die Variablen ProfileGeneration.Gearing.In.diGearNumerator bzw. ProfileGeneration.Gearing.In.diGearDenominator eingestellten Zähler-/Nenner-Faktoren verrechnet.
- Die so skalierte Abweichung wird zur eingestellten Slave-Bezugsposition addiert und ergibt die Slave-Soll-Position.
- Die Differenz der aktuellen Slave-Position zur berechneten Slave-Soll-Position wird berechnet.
- Diese wird als zu korrigierende Distanz beim Ausrichten eingestellt.
- Die aktuelle Master-Position und die daraus berechnete Slave-Soll-Position werden als neue Bezugspositionen übernommen.
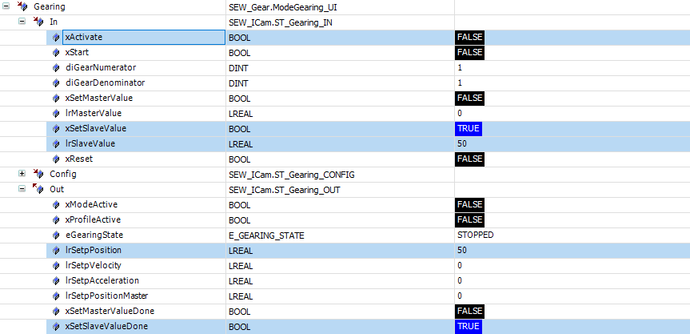
Beispiel
Die aktuelle Master-Position ist 75.0 mm und die aktuelle Sklave-Position 50.0 mm. Die Skalierungsfaktoren sind auf 1 eingestellt. Als Bezugspositionen sind die Nullposition beider Achsen eingestellt. Die Betriebsart "Gearing" wird aktiviert. Daraus ergeben sich folgende Werte:
- Abweichung der Master-Position gegenüber der Bezugsposition: 75.0 mm
- Skalierte Abweichung: 75.0 x 1 / 1 = 75.0
- Skalierte Abweichung plus Slave-Bezugsposition = 75.0 mm = Slave-Soll-Position
- Differenz der aktuellen Slave-Position von der Slave-Soll-Position = -25 mm
- Die Adjust-Funktion muss die Slave-Achse von -25.0 mm auf 0.0 mm verfahren.
Schnittstelle im IEC-Editor
HINWEIS