Configuration
For the following application example, a MOVI-C® CONTROLLER is required as hardware. The real axes used are simulated.
Perform the following steps to configure the combi telescope:
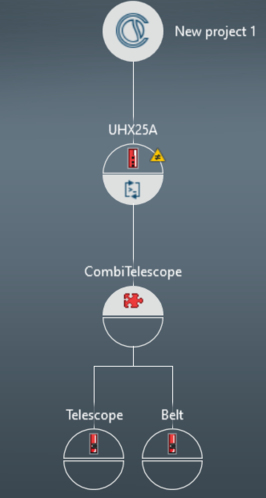
- In MOVISUITE®, in "Planning" mode, create a project with a MOVI-C® CONTROLLER (in the example: "UHX25A"), a software node ("CombiTelescope"), and two axes ("Telescope", "Belt"). Place the telescope axis ("telescope") on the left and the belt axis ("belt") on the right below the software node.
|
- Configure a valid drive train for the two axes.
- Configure the user unit for the "telescope" and "belt" axes (the number of decimal places does not have to be configured here because this is done automatically by assigning the MOVIKIT® Gearing software module in the next step):
- User unit: User-defined unit: mm
- 1 revolution = 100 mm
- Position: mm
- Speed: mm/s
- Acceleration: mm/s²
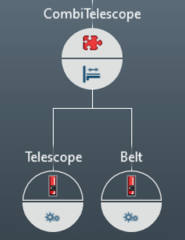
- Assign the following software modules to the software node or axes:
- "Telescope": MOVIKIT® Gearing
- "Belt": MOVIKIT® Gearing
- "CombiTelescope": MOVIKIT® CombiTelescope
|
- Configure the software modules of the "telescope" and the "belt" axes:
- Basic settings – Activate simulation
- Configure the software module of the "CombiTelescope" software node:
- CombiTelescope – number of belts: 1
- CombiTelescope – length of the belt conveyor: 800 mm
- CombiTelescope – belt stop distance via PD: FALSE
- CombiTelescope – belt pretravel distance via PD: FALSE
- CombiTelescope – belt overtravel via PD: FALSE
- CombiTelescope – Distance of box to belt end [3]: 60 mm
- CombiTelescope – Distance of telescope in home position to belt end [4]: 20 mm
- CombiTelescope – Belt stop distance: 50 mm
- CombiTelescope – belt pretravel distance: 50 mm
- CombiTelescope – belt overtravel distance: 70 mm
- Fieldbus interface – Activate fieldbus connection: Yes
- Fieldbus interface – Start address: 1
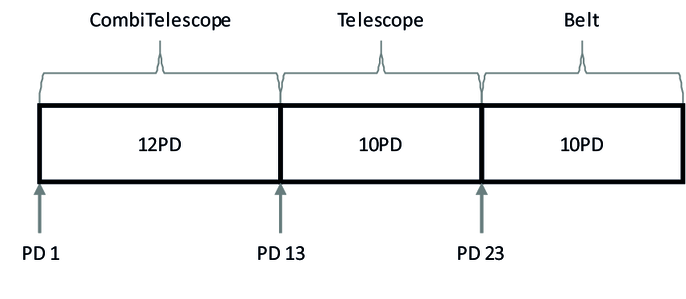
- The configuration results in the following process data assignment:
|
- Switch to "Startup" mode.
- Connect the MOVI-C® CONTROLLER in the project view with the MOVI-C® CONTROLLER in the network view and then update the IEC project.
