Regalbediengerät
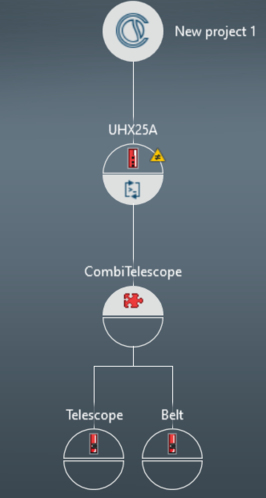
Das Softwaremodul kann zusammen mit dem MOVIKIT® StackerCrane zur Realisierung eines Regalbediengeräts (RBG) mit einem Kombiteleskop als Lastaufnahmemittel (LAM) eingesetzt werden.
In diesem Anwendungsbeispiel ist das Konfigurieren und Betreiben eines Kombiteleskop-LAM mit einem Riemen beschrieben. Weitere Informationen zur Inbetriebnahme eines Regalbediengeräts finden Sie im Handbuch des MOVIKIT® StackerCrane.
|
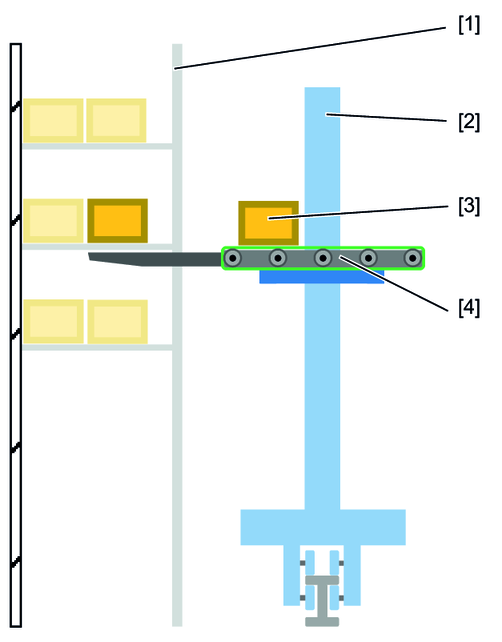
[1] | Regal | [3] | Kiste auf LAM |
[2] | Regalbediengerät | [4] | LAM (Kombiteleskop) |
Einlagerungsprozess
Für das Einlagern einer Kiste muss das Fahrwerk und das Hubwerk an die gewünschte Lagerposition verfahren werden. Die Position des Hubwerks sollte sich leicht über der endgültigen Absetzposition befinden. Mittels der Betriebsart "Einlagern" kann das Kombiteleskop die Kiste in der geforderten Lagertiefe abgeben. Anschließend muss das Hubwerk die Kiste absetzen und das Teleskop in der Betriebsart "Positionieren" in seine Grundstellung zurück gefahren werden.
Auslagerungsprozess
Für das Auslagern einer Kiste muss das Fahrwerk und das Hubwerk an die gewünschte Lagerposition verfahren werden. Die Position des Hubwerks sollte sich leicht unterhalb der Lagerposition befinden, sodass ein kollisionsfreies Ausfahren der Teleskopgabel möglich ist. Das Teleskop muss anschließen in der Betriebsart "Positionieren" auf die Tiefe des Auslagerguts positioniert und mit dem Hubwerk ausgehoben werden. Mittels der Betriebsart "Auslagern" kann dann die Kiste auf das LAM aufgenommen werden.