Referenz Travel
Zum Referenzieren von Achsen steht für alle Achstypen (MOVI-C Achse, virtuelle Achse, CiA402 Achse) eine controller-basierte Referenzfahrt zur Verfügung. Die Referenzfahrt wird über den MOVI-C® CONTROLLER realisiert. Für MOVI-C®-Achsen steht zusätzlich die umrichter-basierte Referenzfahrt zur Verfügung. Diese nutzt zum Referenzieren der Achse die Umrichterfunktion FCB 12.
Es stehen mehrere Referenzfahrttypen zur Auswahl. Alle Einstellungen zur Referenzfahrt können jederzeit auch aus der Applikation über den Funktionsbaustein MC_SEW_ConfigHoming vorgegeben werden. Die Einstellungen im logischen Gerät werden beim Starten des MOVI-C® CONTROLLER in den Umrichter übertragen.
Bei den Referenzfahrttypen mit Referenznocken oder Endschaltern, müssen die Sensoren auf die folgenden Eingänge des Umrichters verdrahtet werden:
- Referenznocke - DI 03
- Endschalter negative - DI 04
- Endschalter positive - DI 05
Das Konfigurationsmenü "Referenzfahrt" enthält folgende Einstellungsmöglichkeiten:
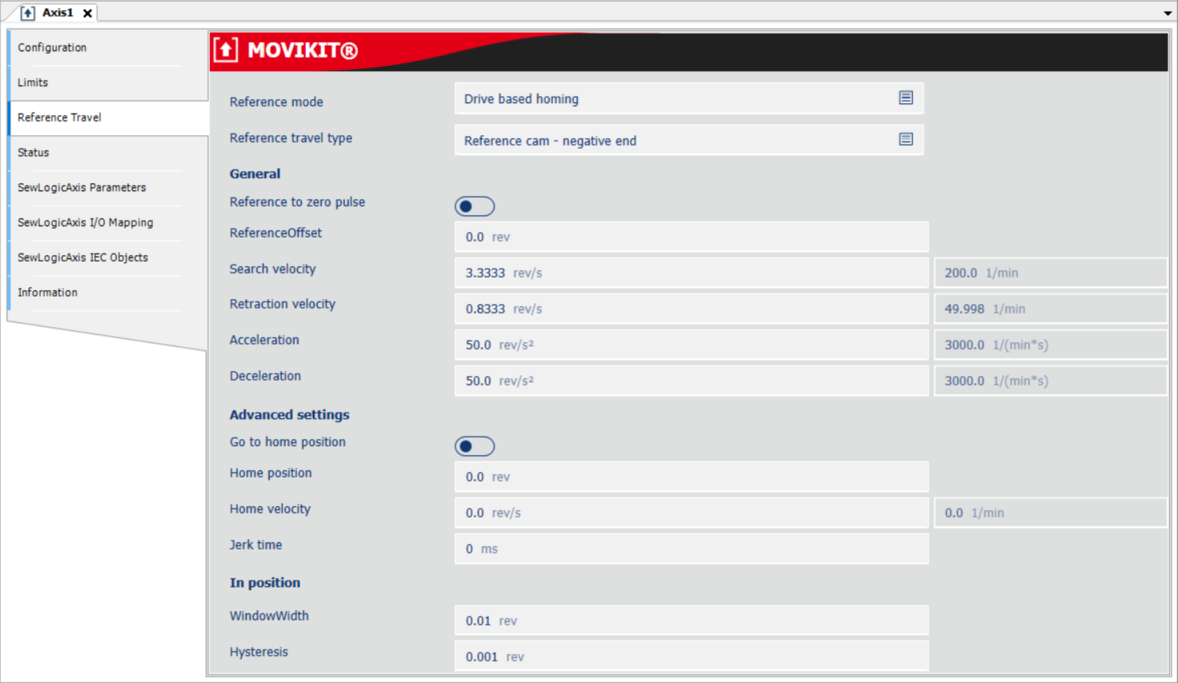
Reference mode
Parameterbezeichnung | Beschreibung |
|---|---|
Controller based homing | Referenzfahrt wird im MOVI-C® CONTROLLER realisiert |
Drive based homing | Beim Ausführen der Referenzfahrt über MC_Home wird die Umrichterfunktion "Referenzfahrt" ausgeführt. Aktuell wird diese Betriebsart nur von MOVI-C®-Achsen unterstützt |
Reference travel type
Parameterbezeichnung | Beschreibung |
|---|---|
Deactivated | Die Referenzfahrt ist deaktiviert. Es ist keine Referenzierung möglich |
Zero pulse – negative direction | Es wird auf den Nullimpuls (Referenzimpuls des Gebers) referenziert. Die erste Suchrichtung ist negativ. Bezugspunkt ist der erste Nullimpuls. Ein Referenznocken ist nicht erforderlich |
Reference cam – negative end | Es wird auf das negative Ende des Referenznockens referenziert. Die erste Suchrichtung ist negativ |
Reference cam – positive end | Es wird auf das positive Ende des Referenznockens referenziert. Die erste Suchrichtung ist positiv |
Limit switch positive/negative | Der Referenzpunkt liegt am Ende des linken/rechten Endschalters. |
Referencing without travel | Bei diesem Referenzfahrttyp wird der Referenzpunkt an der aktuellen Position des Antriebs gesetzt. Der Antrieb führt keine Bewegung aus. |
Reference cam flush – positive end | Es wird auf einen Referenznocken referenziert. Der Referenznocken muss kurz vor oder auf Höhe des positiven Hardware-Endschalters beginnen und in den Endschalter hineinragen. Die Referenzfahrt startet mit Suchgeschwindigkeit in positiver Richtung. Beim Erreichen des negativen Endes des Referenznockens dreht der Antrieb und verlässt den Referenznocken wieder mit Rückzugsgeschwindigkeit. Wird in positiver Drehrichtung kein Referenznocken gefunden, wird ein Fehler am positiven Endschalter ausgelöst. Wird der positive Endschalter während der Verzögerung am Referenznocken angefahren, wird dies ignoriert und die Referenzierung fortgesetzt |
Reference cam flush – negative end | Es wird auf einen Referenznocken referenziert. Der Referenznocken muss kurz vor oder auf Höhe des negativen Hardware-Endschalters beginnen und in den Endschalter hineinragen. Die Referenzfahrt startet mit Suchgeschwindigkeit in negativer Richtung. Bei Erreichen des positiven Endes des Referenznockens dreht der Antrieb und verlässt den Referenznocken wieder mit Rückzugsgeschwindigkeit. Wird in negativer Drehrichtung kein Referenznocken gefunden, wird ein Fehler am negativen Endschalter ausgelöst. Wird der negative Endschalter während der Verzögerung am Referenznocken angefahren, wird dies ignoriert und die Referenzierung fortgesetzt |
Fixed stop positive/negative | Es wird auf einen Festanschlag referenziert. Das System muss so ausgelegt sein, dass der Festanschlag der Belastung durch die jeweilige Geschwindigkeit unbeschadet standhält. Die Suchrichtung ist positiv/negativ. Bezugspunkt ist der positive/negative Festanschlag. Hinweis: Eventuell am Umrichter angeschlossene Hardware-Endschalter werden bei dieser Referenzfahrt-Konfiguration ignoriert. Klemm- und Quetschgefahr |
Absolute position of encoder | Bei dieser Referenzfahrtart wird nur das Referenzbit gesetzt und die aktuelle Position des Gebers als Istposition übernommen. Der Referenzfahrttyp ist nur für Geber sinnvoll, die einen direkten Bezug zum System haben, wie z. B. Lineargeber. Der Referenz-Offset-Parameter wird nicht verwendet. |
Use drive settings | Wird nur bei antriebsbasierter Referenzfahrt verwendet! Verwenden Sie diese Einstellung, wenn ein Referenztyp eines bestimmten Geräts nicht in dieser Aufzählung aufgeführt ist. Bei dieser Einstellung parametriert das Softwaremodul die Referenzfahrt der Antriebe nicht. Die Referenzfahrt der Antriebe kann manuell über das gerätespezifische Engineering-Tool konfiguriert werden |
Einstellwerte für die verschiedenen Referenzfahrttypen
Parameterbezeichnung | Beschreibung |
|---|---|
Reference to zero pulse | Der Eingang legt fest, ob der Nullimpuls (Referenzimpuls des Gebers) als Bezugspunkt verwendet wird. Der Parameter wird bei folgenden Referenzfahrtarten verwendet:
|
Reference offset | Referenzoffset in Anwendereinheiten |
Search velocity | Geschwindigkeit in Anwendereinheit(en), die zum Suchen eines Referenznockens oder Hardware-Endschalters verwendet wird |
Retraction velocity | Geschwindigkeit in Anwendereinheit/en, die während der Referenzfahrt in folgenden Fällen verwendet wird: Beim Verlassen eines Referenznockens oder Hardware-Endschalters. Mit der reduzierten Geschwindigkeit kann der Antrieb exakt auf das Ende des Referenznockens bzw. Endschalters fahren. Beim Suchen eines Nullimpulses (Referenzimpuls des Gebers). Bei Referenzfahrt auf Festanschlag. |
Acceleration | Beschleunigung beim Start oder Drehrichtungsumkehr der Referenzfahrt |
Deceleration | Verzögerung zum Anhalten oder Drehrichtungsumkehr während der Referenzfahrt |
Got to home position | Der Parameter gibt an, ob nach der Refernzfahrt noch eine Grundstellung angefahren werden soll. FALSE: Der Antrieb stoppt am Referenzpunkt. TRUE: Der Antrieb fährt vom Referenzpunkt mit Home velocity nach Home position. |
Home position | Grundposition |
Home velocity | Grundstellungsgeschwindigkeit |
Jerk Time | Ruckzeit |
In position – Window width | Positionsfenster für die Grundstellungsfahrt. |
In position Hysteresis | Positionshysterese für die Grundstellungsfahrt. |
Velocity changeover before fixed stop | Der Eingang gibt an, wann die Suchgeschwindigkeit auf Rückzugsgeschwindigkeit wechselt. Not selected Limit switch Reference cam |
Dwell time at fixed stop | Zeitdauer in ms, wie lange der Festanschlag angefahren bleibt, sobald der im Parameter Drehmomentgrenze Festanschlag definierte Wert erreicht ist. Erst nach dieser Zeit wird der Antrieb referenziert. |
Torque limit at fixed stop | Drehmomentgrenze in % Motornennmoment zum Referenzieren auf Festanschlag. Nach Erreichen dieser Grenze bleibt der Festanschlag so lange angefahren, wie im Parameter Dwell time at fixed stop definiert ist. |
