Überlastschutz
Das folgende Anwendungsbeispiel für das Softwaremodul veranschaulicht die in der Betriebsart "Priorität Schrägstellung" integrierte Funktion "Überlastschutz". Nachfolgend wird anhand eines Hubwerks gezeigt, wie sich die Teilnehmer verhalten, wenn ein Antrieb überlastet ist.
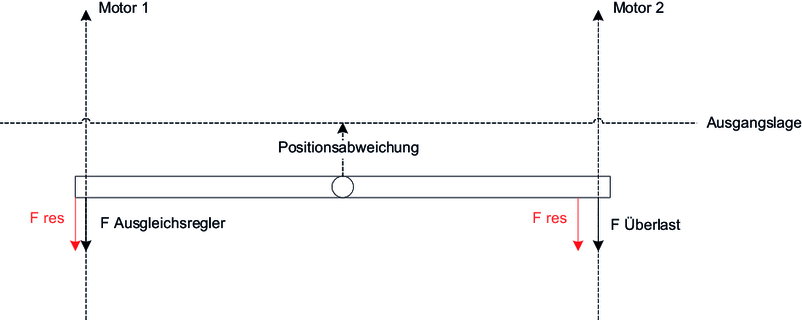
- Ohne Überlastschutz
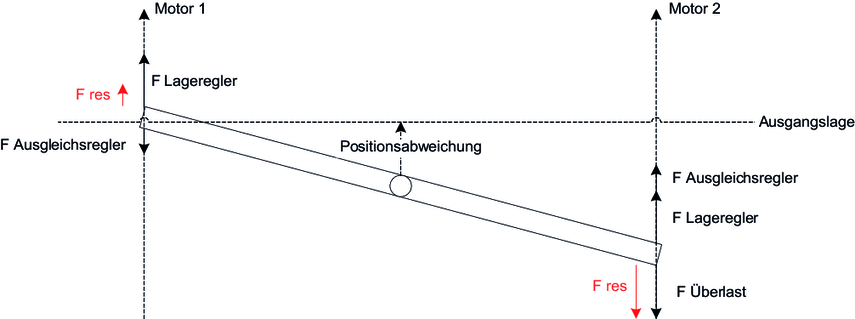
- Durch die Überlastung des Antriebs am Hubwerk kommt es zum Absinken der betroffenen Seite und somit zu einer Positionsabweichung innerhalb der Achsgruppe. Der Lageregler versucht nun diese Positionsabweichung auszugleichen, indem er der Achsgruppe einen Stellwert vorgibt, der für beide Antriebe gilt. Der Ausgleichsregler erkennt, dass die Antriebe eine Positionsdifferenz zueinander aufweisen und versucht diese auszugleichen. Der Stellwert des Ausgleichsreglers wirkt dadurch dem Stellwert des Lagereglers für Antrieb 1 entgegen. Je nach Konfiguration der einzelnen Regler führt dies dazu, dass die Schieflage des Hubwerks verschlimmert wird. Bei Antrieb 2 wirken der Ausgleichsregler und der Lageregler in die gleiche Richtung. Da sich Antrieb 2 jedoch an seiner Drehmomentgrenze befindet, kann er das gewünschte Drehmoment nicht mehr aufbringen.

- Mit Überlastschutz
- Das Softwaremodul erkennt, dass sich Teilnehmer 2 an seinem maximalen Drehmoment befindet und eliminiert deshalb den Stellwert, den der Lageregler vorgibt. Antrieb 1 reagiert dann weiterhin auf die Schieflage der Anwendung und bewegt sich zusammen mit Antrieb 2 synchron abwärts.