Konfiguration
- Für das folgende Anwendungsbeispiel wird als Hardware ein MOVI-C® CONTROLLER benötigt. Die verwendeten realen Achsen werden simuliert.
- Legen Sie in MOVISUITE® im Modus "Planung" ein Projekt mit einem MOVI-C® CONTROLLER, einer virtuellen Achse ("Master") und einer realen Achsen ("FlyingSaw") an. Die virtuelle Achse fungiert im Anwendungsbeispiel als Master-Achse.
- Konfigurieren Sie für die reale Achse einen gültigen Antriebsstrang ohne Anwendereinheiten.
- Weisen Sie den Achsen folgende Softwaremodule zu:
- Konfigurieren Sie für die "Master"-Achse die Anwendereinheit:
- Konfigurieren Sie für die "FlyingSaw"-Achse die Anwendereinheit:
- Konfigurieren Sie das Softwaremodul der "Master"-Achse:
- Konfigurieren Sie das Softwaremodul der "FlyingSaw"-Achse:
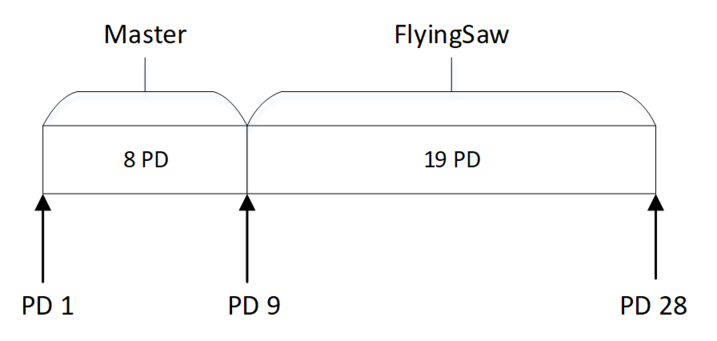
- Aus der Konfiguration resultiert folgende Prozessdatenbelegung:
- Öffnen Sie die Konfiguration des MOVIRUN® flexible.
- Wählen Sie im Konfigurationsmenü "Feldbus" im Bereich "Felbuskarte" ein Feldbus-Protokoll.
- Wechseln Sie in den Modus "Inbetriebnahme".
- Verbinden Sie den MOVI-C® CONTROLLER in der Projekt-Sicht mit dem MOVI-C® CONTROLLER in der Netzwerkansicht und aktualisieren Sie anschließend das IEC-Projekt.