Appendix 1 Robot program
The robot program in this example consists of 4 separate programs. These programs are called by the "Robot_Gantry" machine module. If other movements are required, the robot programs must be adjusted. If the machine is to work in a different way, the machine module must be adjusted.
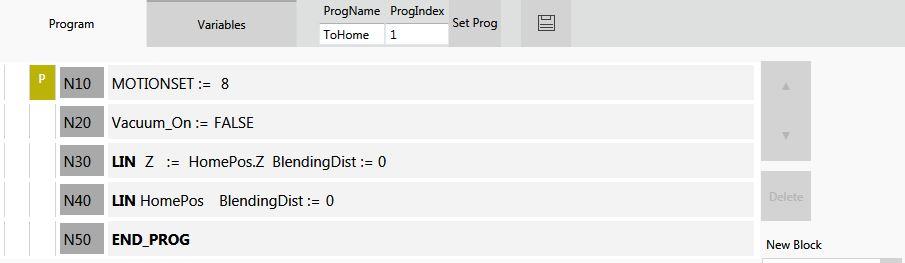
The first program moves the robot to the home position.
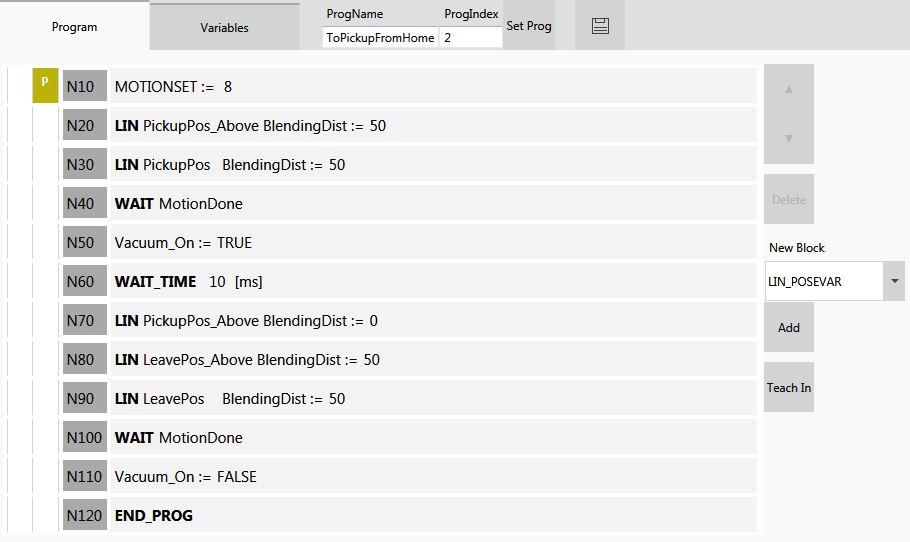
The second program positions the robot from the home position to the pick position.
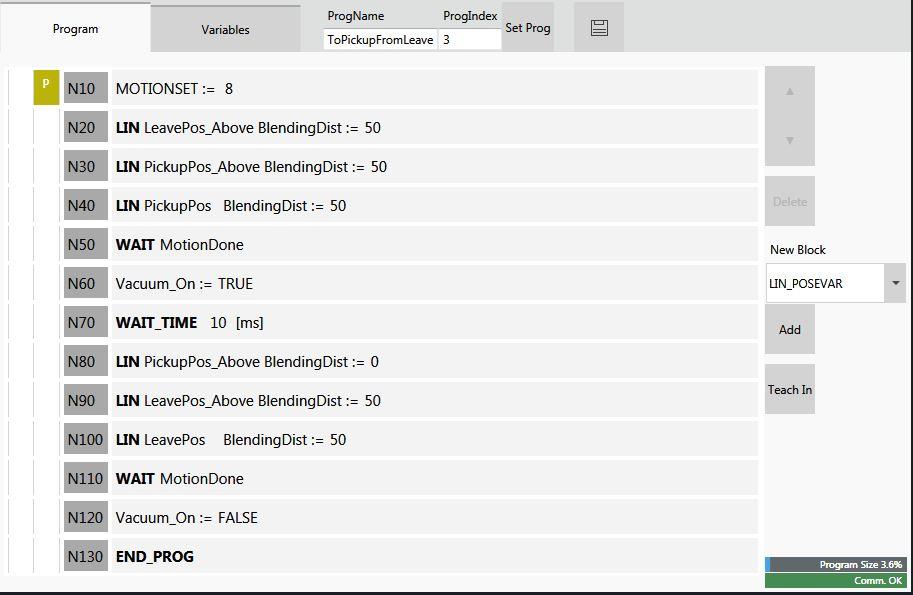
The third robot program positions the robot from the leave position to the pick position and finally back to the leave position.
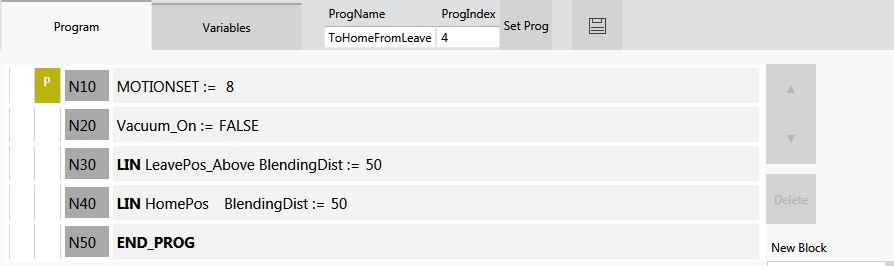
The fourth program positions the robot from the leave position to the home position.
The positions are defined in a table. The SEW Robot Language (SRL) can also be used to define the positions by moving the robot to a position and entering the position in the table using the teach function.
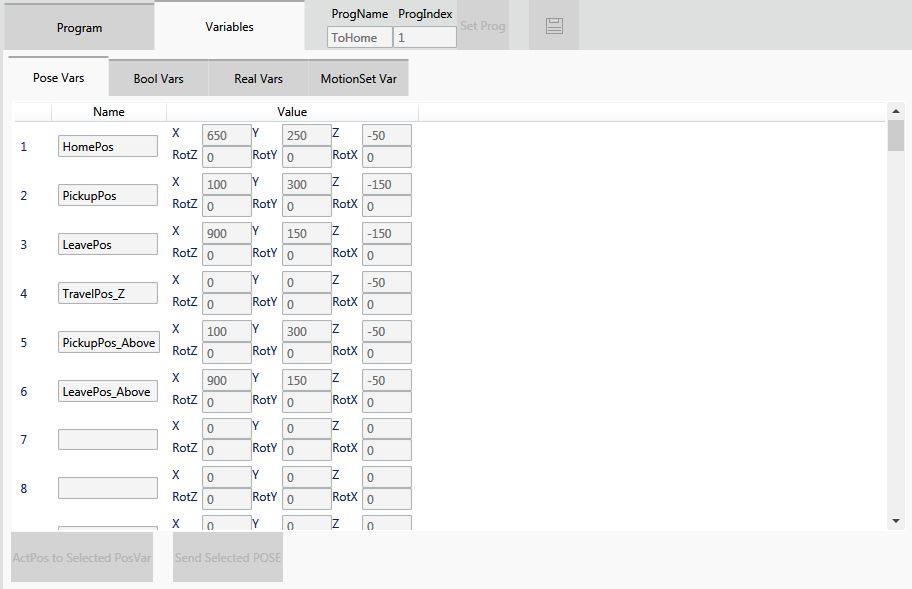
Other variables used in the SRL are listed in the variable list.

