Anhang 1 Roboterprogramm
Das Roboterprogramm in diesem Beispiel besteht aus vier separaten Programmen. Diese Programme werden von dem Maschinenmodul "Robot_Gantry" aufgerufen. Wenn andere Bewegungen erforderlich sind, müssen die Roboterprogramme angepasst werden. Wenn die Maschine auf andere Art arbeiten soll, muss das Maschinenmodul angepasst werden.
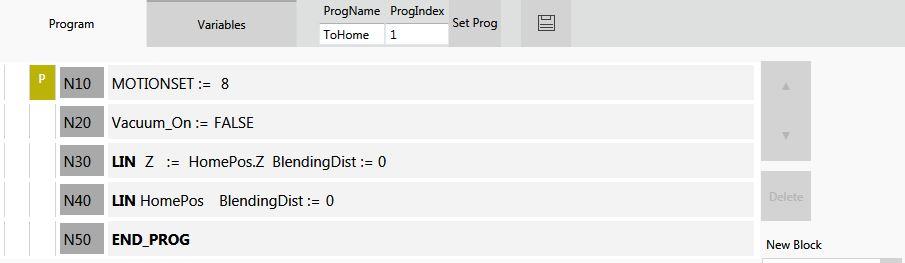
Das erste Programm fährt den Roboter in die Home-Position.
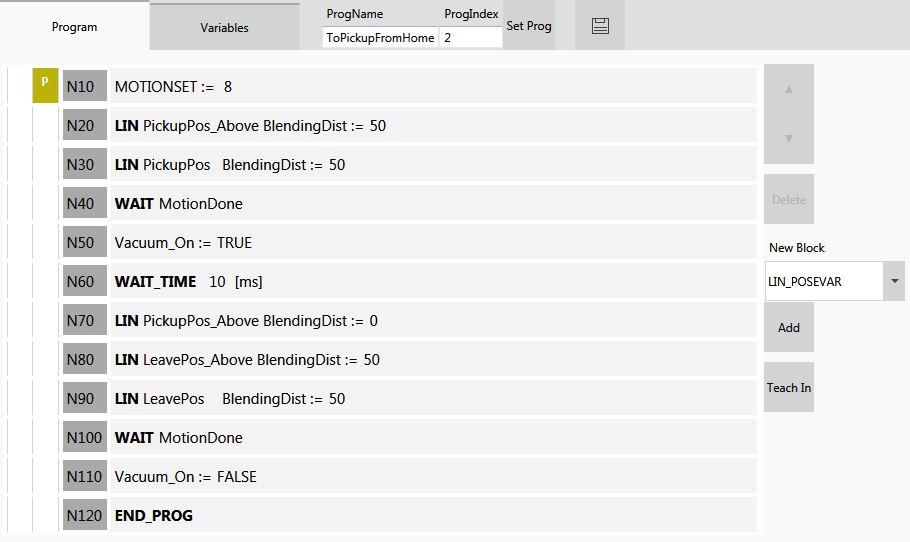
Das zweite Programm positioniert den Roboter von der Home-Position in die Pick-Position .
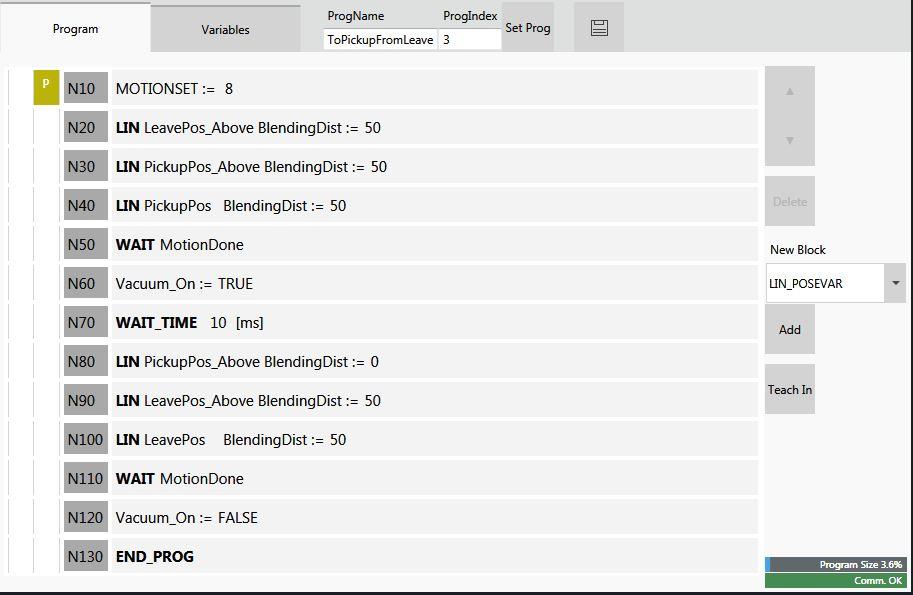
Das dritte Roboterprogramm positioniert den Roboter von der Leave-Position in die Pick-Position und schließlich zurück in die Leave-Position.
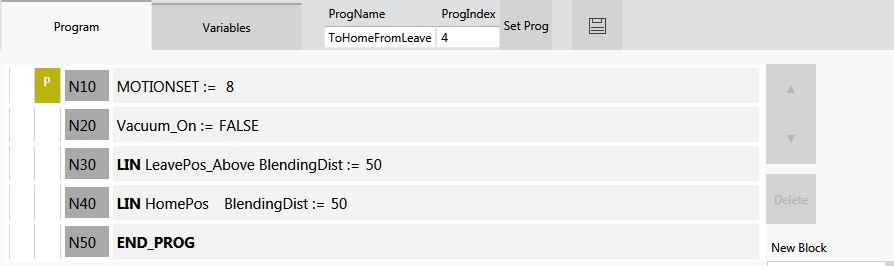
Das vierte Programm positioniert den Roboter von der Leave-Position in die Home-Position.
Die Positionen werden in einer Tabelle definiert. Mithilfe der SEW Robotic Language (SRL) können die Positionen außerdem definiert werden, indem der Roboter an eine Position gefahren wird und die Position mit der Teach-Funktion in die Tabelle eingetragen wird.
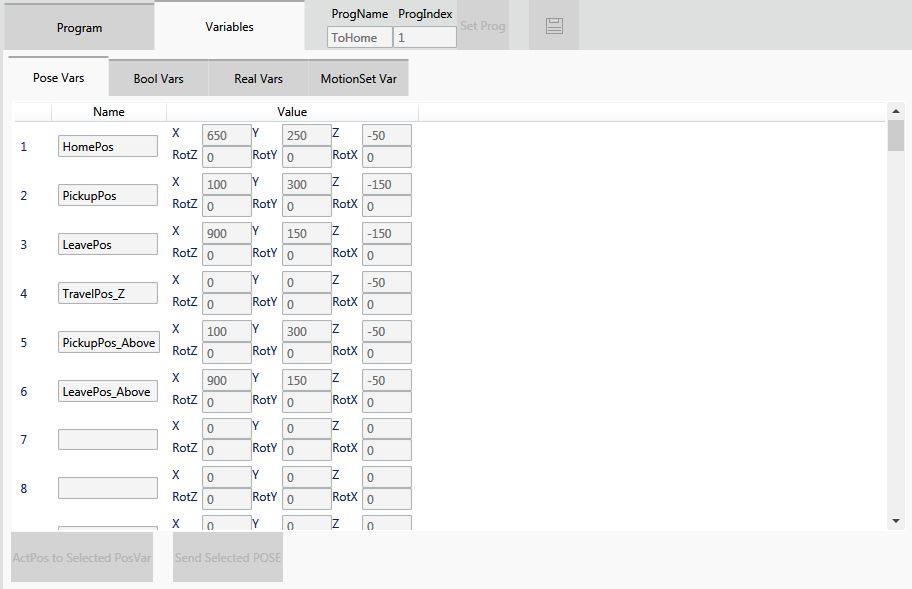
Andere in der SRL verwendete Variablen sind in der Variablenliste aufgeführt.

