Betriebsarten
HINWEIS
Das Softwaremodul MOVIKIT® Velocity Drive verwendet die Betriebsart Drehzahlregelung (200). Die Betriebsart kann beim Einsatz des MOVIKIT® Velocity Drive nicht manuell aktiviert werden.
Betriebsarten des MOVIKIT® Positioning Drive und deren Anwendungsbereiche:
Betriebsart | dezimal | Beschreibung |
|---|---|---|
Tippbetrieb | 100 | Tippbetrieb – Positionsgeregelt (FCB 20) Geberrückführung erforderlich |
101 | Tippbetrieb – Dehzahlgeregelt (FCB 05) Geberrückführung nicht erforderlich | |
Drehzahlvorgabe | 200 | Drehzahlregelung (FCB 05) Geberrückführung nicht erforderlich |
Referenzierbetrieb | 300 | Referenzfahrt – Offset über Parameter (FCB 12) |
301 | Referenzfahrt – Offset über Feldbus (FCB 12) | |
Positionierbetrieb
| 400 | Absolute Positionierung (FCB 09) |
401 | Relative Positionierung (FCB 09) | |
402 | Modulo-Positionierung – Positive Richtung (FCB 09) | |
403 | Modulo-Positionierung – Negative Richtung (FCB 09) | |
404 | Modulo-Positionierung – Optimierte Richtung (FCB 09) | |
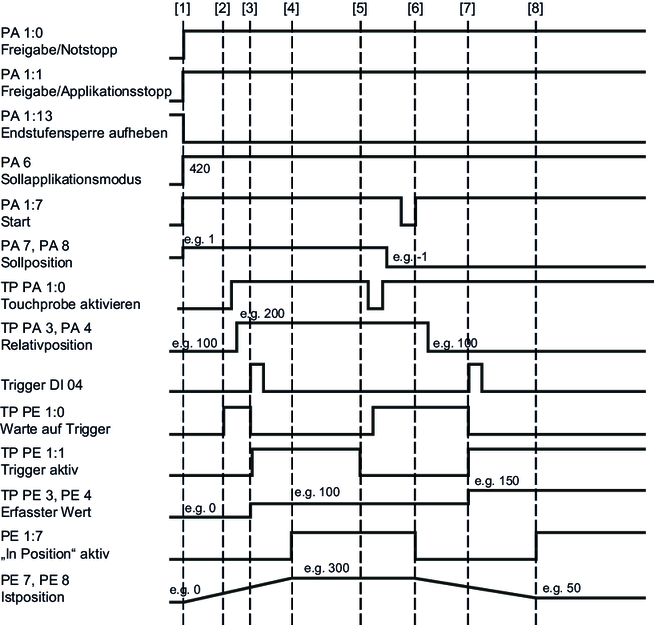
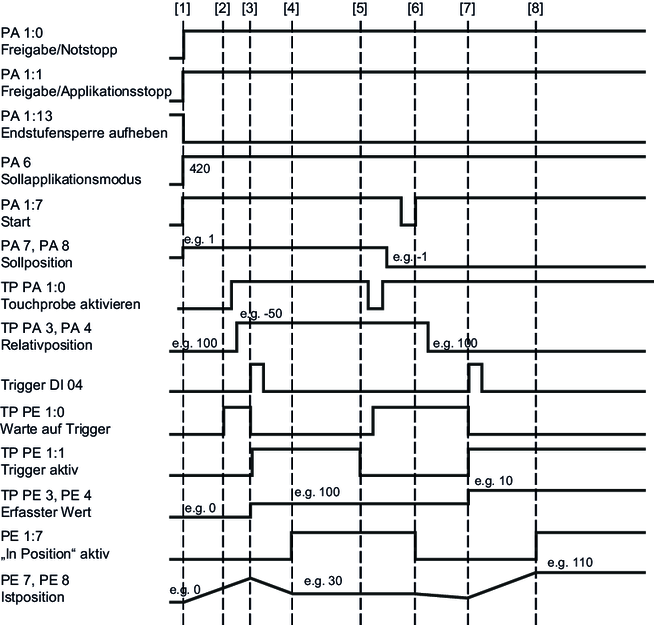
420 | Touchprobe-Positionierung – Absolute Zielposition – Restweg in Fahrtrichtung (FCB 09) | |
421 | Touchprobe-Positionierung –Absolute Zielposition – Restweg mit Vorzeichen (FCB 09) | |
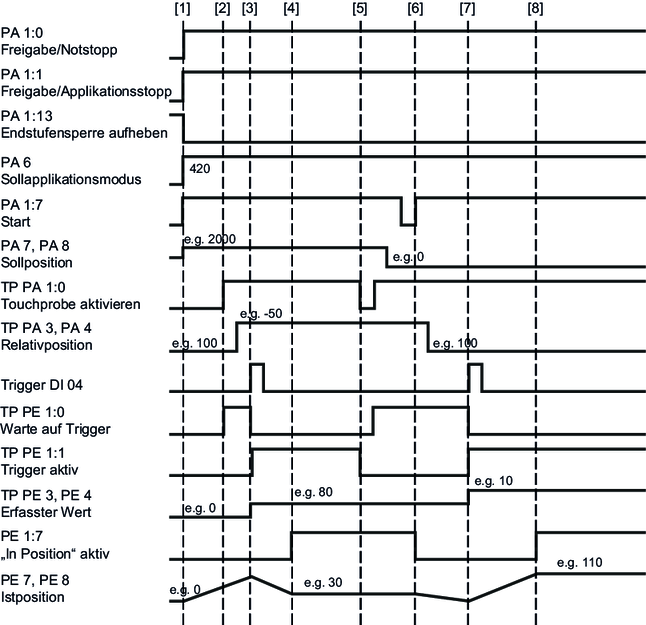
422 | Touchprobe-Positionierung –Endlos – Restweg in Fahrtrichtung (FCB 09) | |
423 | Touchprobe-Positionierung –Endlos – Restweg mit Vorzeichen (FCB 09) | |
Bremsentest | 700 | Bremsentest (FCB 21) Betriebsart für die Zusatzfunktion Bremsentest |
HINWEIS
Für den Betrieb der Funktionsbausteine gelten die in MOVISUITE® durchgeführten Konfigurationen. Die Modulo-Betriebsarten können nur verwendet werden, wenn in der Konfiguration des Softwaremoduls unter [Überwachungsfunktionen] > [Grenzwerte] eine Zyklusbegrenzung eingestellt wurde.
HINWEIS
Das Verhalten im Stillstand hängt von der Einstellung des Parameter "Verhalten bei Stillstand (Index 8563.1/8564.1)
HINWEIS
Ab Version 2.1 der Softwaremodule, wird bei der erstmaligen Wahl der Applikationsmodi "401: Relative Positionierung", "402: Modulo-Positionierung – Positive Richtung", "403: Modulo-Positionierung – Negative Richtung" und "404: Modulo-Positionierung – Optimierte Richtung" kurzzeitig in den FCB 26 gewechselt, um den Bezugspunkt der relativen Positionierung korrekt zu setzen.
Wenn der Antrieb zum Zeitpunkt, an dem der Applikationsmodus 401 gewählt wird, noch in Bewegung ist, wird mit FCB 26 bis zum Stopp verzögert. Der Haltepunkt ist Bezugspunkt für die relative Positionierung. Beim Wechseln in die Applikationsmodi 402, 403 und 404 erfolgt keine Bremsverzögerung.
Zur Verdeutlichung der Funktionsweise finden Sie in den folgenden Kapiteln zu jeder Betriebsart ein Taktdiagramm sowie den Prozessablauf mit einer Beschreibung der zu setzenden Signale und der Signalzustände.
- Voraussetzung für Taktdiagramme
- Tippbetrieb (100/101)
- Drehzahlregelung (200)
- Referenzierbetrieb (300/301)
- Positionierbetrieb Absolut (400)
- Positionierbetrieb Relativ (401)
- Positionierbetrieb Modulo – Positive Richtung (402)
- Positionierbetrieb Modulo – Negative Richtung (403)
- Positionierbetrieb Modulo - Optimierte Richtung (404)
- Positionierbetrieb Touchprobe - Absolute Zielposition – Restweg in Fahrtrichtung (420)
- Positionierbetrieb Touchprobe - Absolute Zielposition – Restweg mit Vorzeichen (421)
- Positionierbetrieb Touchprobe - Endlos – Restweg in Fahrtrichtung (422)
- Positionierbetrieb Touchprobe - Endlos – Restweg mit Vorzeichen (423)