Konfiguration - PID (ST_Config_PID)
Variablenname | Beschreibung |
|---|---|
lrFeedbackSignalScalingU1 lrFeedbackSignalScalingP1 lrFeedbackSignalScalingU2 lrFeedbackSignalScalingP2 | Datentyp – LREAL |
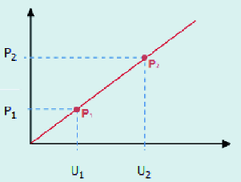
Skalierung des Istwertsignals: Zur Skalierung des Istwertsignals müssen 2 Wertepaare angegeben werden die sich aus dem Eingangsignal U1/U2 mit der dazugehörigen Zugkraft/Tänzerposition P1/P2 ergeben. In der Abbildung ist eine positive Kennlinie dargestellt. Für eine negative Kennlinie muss für P1 ein größer Wert als P2 angegeben werden.
| |
uiFeedbackSignalFilterTime | Datentyp – UINT |
Filterzeit (VZ1-Filter) in ms des skalierten Istwertsignals | |
lrKP | Datentyp – LREAL |
Regelverstärkung (P-Anteil) Aktiv wenn xKPdynOFF = "TRUE", um während der Inbetriebnahme die dynamische Verstärkung abzuschalten und verschiedene Werte zu testen. | |
lrTN | Datentyp – LREAL |
Nachstellzeit (I-Anteil) in ms Hohe Werte (z. B. 60000 ms) haben eine sehr geringen und kleine Werte (z. B. 1000 ms) einen sehr großen Einfluss. | |
lrTV | Datentyp – LREAL |
Vorhaltezeit (D-Anteil) in ms HINWEIS: 0 ms deaktiviert diesen Anteil. | |
xPIDreset | Datentyp – BOOL |
| |
uiLimiterPos uiLimiterNeg | Datentyp – UINT |
Positive oder negative Begrenzung des PID-Regler-Ausgangssignals. Die Werte müssen abhängig von der Betriebsart in folgender Einheit angegeben werden:
| |
uiWeightingPID | Datentyp – UINT |
Gewichtung des PID-Regler Ausgangssignal in %, um den Einfluss zu veringern oder zu erhöhen HINWEIS: 100 % entspricht dem Faktor 1. | |
uiWeightingPreCtrl | Datentyp – UINT |
Gewichtung der Vorsteuerung (aktuelle Bahngeschwindigkeit) in % für die Betriebsart Tänzerlagereglung und Zugkraftregelung über Solldrehzahl HINWEIS: 100 % entspricht dem Faktor 1. | |
uiLineSpeedFilterTime | Datentyp – UINT |
Filterzeit (VZ1-Filter) des Eingangssignals lrActualLineSpeed in ms | |
xKPdynOFF | Datentyp – BOOL |
| |
lrKpDynDx1 lrKpDynD1 lrKpDynDx2 lrKpDynD2 | Datentyp – LREAL |
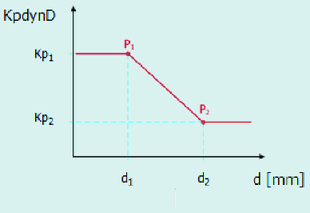
Parametrierung der durchmesserabhängigen Reglerverstärkung: 2 Wertepaare, die sich aus den Durchmessern d1 und d2 (lrKpDynDx1 und lrKpDynDx2) mit den dazugehörigenVerstärkungsfaktoren Kp1 und Kp2 (lrKpDynD1 und lrKpDynD2) ergeben. Standardmäßig muss die Reglerverstärkung mit zunehmendem Durchmesser reduziert werden. In der Abbildung ist eine negative Kennlinie dargestellt. Für eine positive Kennlinie geben Sie für Kp1 (lrKpDynD1) einen kleineren Wert als Kp2 (lrKpDynD2) ein.
Die gesamte Reglerverstärkung ergibt sich aus dem Produkt der beiden dynamischen Anteile: | |
lrKpDynVx1 lrKpDynV1 lrKpDynVx2 lrKpDynV2 | Datentyp – LREAL |
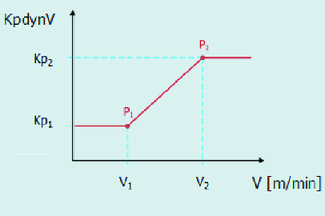
Parametrierung der geschwindigkeitsabhängigen Reglerverstärkung: 2 Wertepaare, die sich aus den Bahngeschwindigkeiten v1 und v2 (lrKpDynVx1 und lrKpDynVx2) mit den dazugehörigen Verstärkungsfaktoren Kp1 und Kp2 (lrKpDynV1 und lrKpDynV2) ergeben. Standardmäßig muss die Reglerverstärkung mit zunehmender Geschwindigkeit erhöht werden. In der Abbildung ist eine positive Kennlinie dargestellt. Für eine negative Kennlinie geben Sie für Kp1 (lrKpDynV1) einen größeren Wert als Kp2 (lrKpDynV2) ein.
Die gesamte Reglerverstärkung ergibt sich aus dem Produkt der beiden dynamischen Anteile: |