Zugkraftregelung über Regelung der Solldrehzahl durch Zukraftmessung (TensionSpeed)
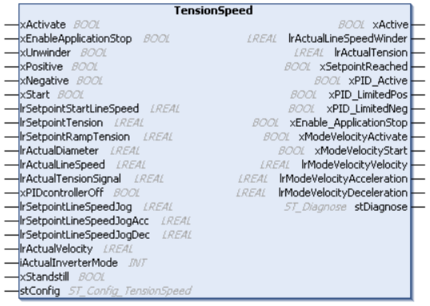
Der Funktionsbaustein TensionSpeed enthält Steuer- und Statusvariablen für die Zugkraftregelung über Regelung der Solldrehzahl durch Zukraftmessung.
Übersicht
Startbedingung
Variable | Zustand | |
|---|---|---|
xPositive | 0 | 1 |
xNegative | 1 | 0 |
xStart | 1 | 1 |
Prozesszustand - Leitgeschwindigkeit = 0, Antrieb steht:
- Mit den Signalen xPositive und xNegative wird die Drehrichtung so bestimmt, dass der Antrieb als Abwickler oder Aufwickler (xUnwinder) arbeitet.
- Mit der Starbedingung beschleunigt der Antrieb mit lrAccDecMax (ST_Config_General) auf lrSetpointStartLineSpeed automatisch in die Drehrichtung, die zu einem Aufwickeln des Materials führt (Anwickelfunktion).
- Mit Überschreiten der Sollzugkraft lrSetpointTension wird die PID-Regelung eingeschaltet und die Anwickelfunktion beendet.
- Wenn bei der Startbedingung lrSetpointStartLineSpeed = "0" vorgegeben wird, schaltet die PID-Regelung ohne Anwickelfunktion ein.
Prozesszustand - Leitgeschwindigkeit > 0, Antrieb dreht, Sollwert erreicht:
- Die Änderung der Sollzugkraft lrSetpointTension erfolgt mit der Sollwertrampe lrSetpointRampTension.
Stoppbedingung
Variable | Zustand | |||||
|---|---|---|---|---|---|---|
xPositive | 0 | 1 | 0 | 1 | 0 | 1 |
xNegative | 0 | 1 | 1 | 0 | 0 | 1 |
xStart | 1 | 0 | 0 | 0 | 0 | 1 |
- Die PID-Regelung wird abgeschaltet. Ein drehender Antrieb wird mit lrLineSpeedStopDec (ST_Config_General) bis zum Stillstand abgebremst.
Weiterführende Informationen
