Inertia properties
The following inertia properties must be defined for all links of the selected kinematic model.
INFORMATION
In the case of TRIPOD_RRR_M10/TRIPOD_RRRR_M10/TRIPOD_RRRRR_M10, all 3 upper arms and all 6 forearms generally have identical masses, centers of gravity and inertias. If the "Arm properties different" button is deactivated, only one upper arm, one forearm and the tool plate are displayed for configuration. The properties of the upper arm for the 3 upper arms are used. Only one of the 2 forearm rods must be parameterized. Its properties are used for the total of 6 forearm rods. The activated "Arm properties different" button allows the user to enter different inertia properties for each link. The "Copy arm properties" button facilitates correct configuration.
Parameter designation | Description |
|---|---|
Mass | Mass of the respective link. |
Center of gravity (X, Y, Z) | Center of gravity of the respective link. X, Y, and Z refer to the LCS (Link Coordinate System) of the link. |
Inertia (XX, YY, ZZ, XY, XZ, ZX) | Inertia matrix around the center of gravity. X, Y, and Z refer to the LCS (Link Coordinate System) of the respective link. The moments of inertia [X,X], [Y,Y] and [Z,Z] must be positive. |
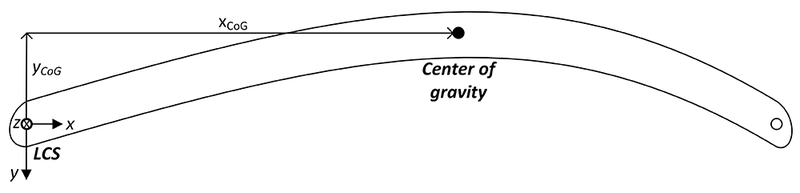
The origin of the LCS (Link Coordinate System) of each link is located at the beginning of the link at the joint (see figure). The z-axis points in positive axis direction (along the output shaft of the drive). The x-axis normally points to the next joint, i.e. to the subsequent LCS.
The LCS of all kinematic models are shown in chapter Functional description for the respective kinematic model and can be displayed in the 3D simulation. As a general rule, and in particular if the Cartesian assignment is unequal to 0, it is recommended to use the LCS in the 3D simulation of the RobotMonitor as a guide (3D Simulation > Control Panel > Coordinate Systems > Links).
For ROLLER_GANTRY_RR_M10 kinematic models, the following parameters are additionally displayed in the "Inertia properties" configuration menu:
Parameter designation | Description |
|---|---|
Belt pulleys: Inertia | Mass moment of inertia of all belt pulleys together |
Belt: Inertia | Mass moment of inertia of the belt Can be calculated from |
1st Cartesian link: Mass | Mass of the first Cartesian joint that can only be moved in one direction:
|
2nd Cartesian link: Mass | Mass of the second Cartesian joint that can be moved in two directions:
|
