Trägheitseigenschaften
Für alle Armglieder des gewählten Kinematikmodells müssen folgende Trägheitseigenschaften definiert werden.
HINWEIS
Beim TRIPOD_RRR_M10/TRIPOD_RRRR_M10/TRIPOD_RRRRR_M10 weisen in der Regel alle 3 Oberarme und alle 6 Unterarme die jeweils identischen Massen, Schwerpunkte und Trägheiten auf. Bei deaktivierter Schaltfläche "Armeigenschaften unterschiedlich" werden nur ein Oberarm, ein Unterarm und die Werkzeugplatte zum Konfigurieren angezeigt. Dabei werden die Eigenschaften vom Oberarm für die 3 Oberarme verwendet. Es ist nur einer der 2 Unterarmstäbe zu parametrieren. Dessen Eigenschaften werden für die insgesamt 6 Unterarmstäbe verwendet. Die aktivierte Schaltfläche "Armeigenschaften unterschiedlich" ermöglicht es dem Anwender, für jedes Armglied unterschiedliche Trägheitseigenschaften einzutragen. Die Schaltfläche "Armeigenschaften kopieren" erleichtert dabei das korrekte Konfigurieren.
Parameterbezeichnung | Beschreibung |
|---|---|
Masse | Masse des jeweiligen Armgliedes. |
Schwerpunkt (X, Y, Z) | Schwerpunkt des jeweiligen Armgliedes. X, Y und Z beziehen sich auf das LCS (Link Coordinate System) des Armgliedes. |
Trägheit (XX, YY, ZZ, XY, XZ, ZX) | Trägheitsmatrix um den Schwerpunkt. X, Y und Z beziehen sich auf das LCS (Link Coordinate System) des jeweiligen Armgliedes. Die Trägheitsmomente [X,X], [Y,Y] und [Z,Z] müssen positiv sein. |
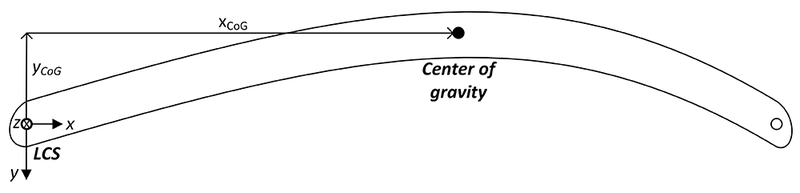
Der Ursprung des LCS (Link Coordinate System) jedes Armgliedes liegt am Anfang des Armglieds im Gelenk (siehe Abbildung). Die z-Achse zeigt in positive Achs-Richtung (entlang der Abtriebswelle des Antriebs). Die x-Achse zeigt in der Regel zum nächsten Gelenk, also zum nachfolgenden LCS.
Die LCS aller Kinematikmodelle sind im Kapitel Funktionsbeschreibung beim jeweiligen Kinematikmodell dargestellt und können in der 3D-Simulation eingeblendet werden. Grundsätzlich und insbesondere wenn die kartesische Zuordnung ungleich 0 ist, wird empfohlen, sich an den LCS in der 3D-Simulation des RobotMonitors zu orientieren (3D-Simulation > Control Panel > Coordinate Systems > Links).
Bei Kinematikmodellen vom Typ ROLLER_GANTRY_RR_M10 werden zusätzlich im Konfigurationsmenü "Trägheitseigenschaften" folgende Parameter angezeigt.
Parameterbezeichnung | Beschreibung |
|---|---|
Riemenräder: Trägheit | Trägheitsmoment aller Riemenräder zusammen |
Riemen: Trägheit | Trägheitsmoment des Riemens Kann berechnet werden aus |
1. Kartesisches Glied: Masse | Masse des ersten kartesischen Gelenkes, das nur in eine Richtung bewegt werden kann:
|
2. Kartesisches Glied: Masse | Masse des zweiten kartesischen Gelenkes, das in zwei Richtungen bewegt werden kann:
|
